 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision Theory-Guided Deep Reinforcement Learning for Fast Learning
Paper and Code
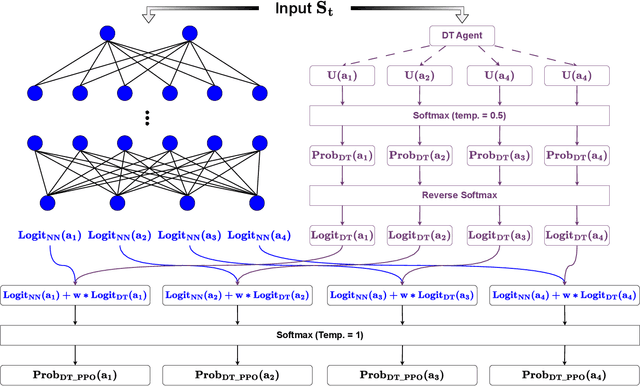
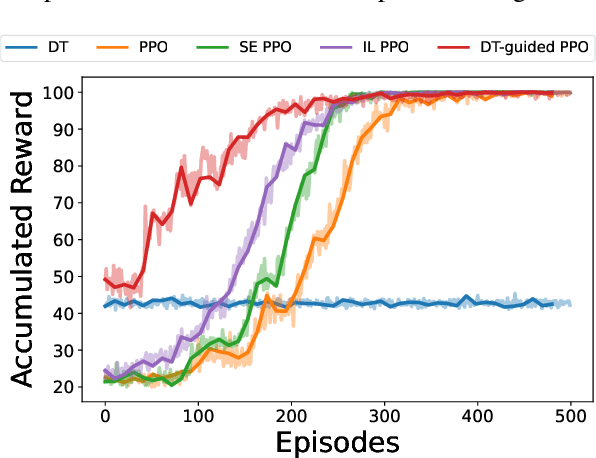
This paper introduces a novel approach, Decision Theory-guided Deep Reinforcement Learning (DT-guided DRL), to address the inherent cold start problem in DRL. By integrating decision theory principles, DT-guided DRL enhances agents' initial performance and robustness in complex environments, enabling more efficient and reliable convergence during learning. Our investigation encompasses two primary problem contexts: the cart pole and maze navigation challenges. Experimental results demonstrate that the integration of decision theory not only facilitates effective initial guidance for DRL agents but also promotes a more structured and informed exploration strategy, particularly in environments characterized by large and intricate state spaces. The results of experiment demonstrate that DT-guided DRL can provide significantly higher rewards compared to regular DRL. Specifically, during the initial phase of training, the DT-guided DRL yields up to an 184% increase in accumulated reward. Moreover, even after reaching convergence, it maintains a superior performance, ending with up to 53% more reward than standard DRL in large maze problems. DT-guided DRL represents an advancement in mitigating a fundamental challenge of DRL by leveraging functions informed by human (designer) knowledge, setting a foundation for further research in this promising interdisciplinary domain.