Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision making in dynamic and interactive environments based on cognitive hierarchy theory, Bayesian inference, and predictive control
Paper and Code
Sep 14, 2019
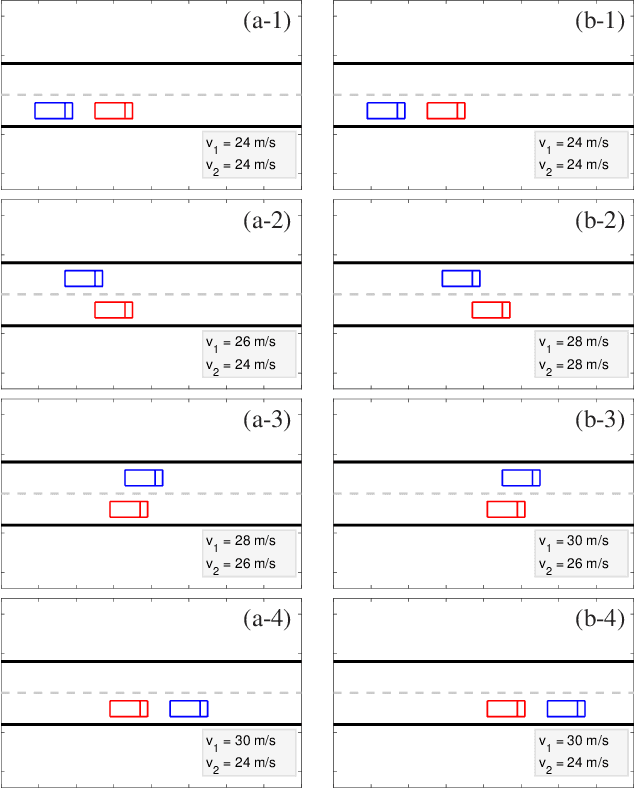

n this paper, we describe an integrated framework for autonomous decision making in a dynamic and interactive environment. We model the interactions between the ego agent and its operating environment as a two-player dynamic game, and integrate cognitive behavioral models, Bayesian inference, and receding-horizon optimal control to define a dynamically-evolving decision strategy for the ego agent. Simulation examples representing autonomous vehicle control in three traffic scenarios where the autonomous ego vehicle interacts with a human-driven vehicle are reported.
* 2019 IEEE Conference on Decision and Control
View paper on