 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEC-LOS-RRT: Decentralized Path Planning for Multi-robot Systems with Line-of-sight Constrained Communication
Paper and Code
Mar 04, 2022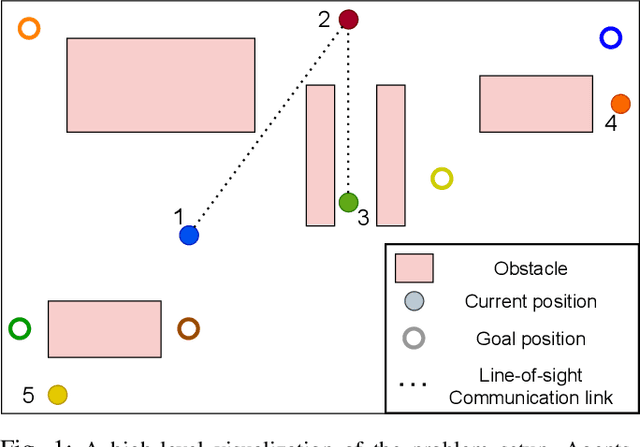
Decentralized planning for multi-agent systems, such as fleets of robots in a search-and-rescue operation, is often constrained by limitations on how agents can communicate with each other. One such limitation is the case when agents can communicate with each other only when they are in line-of-sight (LOS). Developing decentralized planning methods that guarantee safety is difficult in this case, as agents that are occluded from each other might not be able to communicate until it's too late to avoid a safety violation. In this paper, we develop a decentralized planning method that explicitly avoids situations where lack of visibility of other agents would lead to an unsafe situation. Building on top of an existing Rapidly-exploring Random Tree (RRT)-based approach, our method guarantees safety at each iteration. Simulation studies show the effectiveness of our method and compare the degradation in performance with respect to a clairvoyant decentralized planning algorithm where agents can communicate despite not being in LOS of each other.