 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDCF-ASN: Coarse-to-fine Real-time Visual Tracking via Discriminative Correlation Filter and Attentional Siamese Network
Paper and Code
Mar 19, 2021
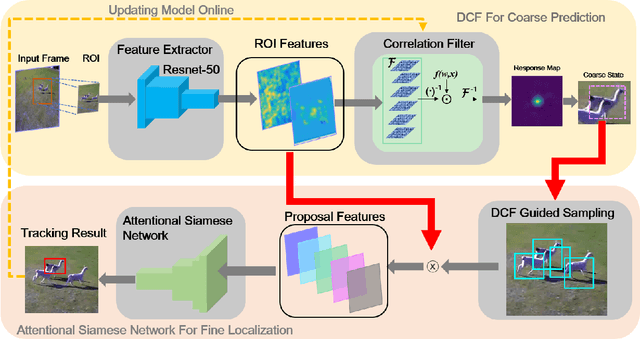

Discriminative correlation filters (DCF) and siamese networks have achieved promising performance on visual tracking tasks thanks to their superior computational efficiency and reliable similarity metric learning, respectively. However, how to effectively take advantages of powerful deep networks, while maintaining the real-time response of DCF, remains a challenging problem. Embedding the cross-correlation operator as a separate layer into siamese networks is a popular choice to enhance the tracking accuracy. Being a key component of such a network, the correlation layer is updated online together with other parts of the network. Yet, when facing serious disturbance, fused trackers may still drift away from the target completely due to accumulated errors. To address these issues, we propose a coarse-to-fine tracking framework, which roughly infers the target state via an online-updating DCF module first and subsequently, finely locates the target through an offline-training asymmetric siamese network (ASN). Benefitting from the guidance of DCF and the learned channel weights obtained through exploiting the given ground-truth template, ASN refines feature representation and implements precise target localization. Systematic experiments on five popular tracking datasets demonstrate that the proposed DCF-ASN achieves the state-of-the-art performance while exhibiting good tracking efficiency.