 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Survivability in Networks of Mobile Robots in Urban Disaster Environments
Paper and Code
Feb 22, 2013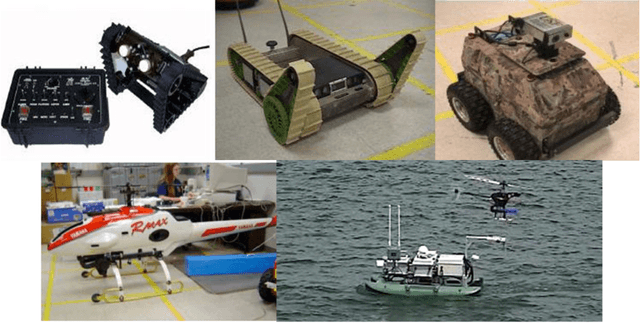
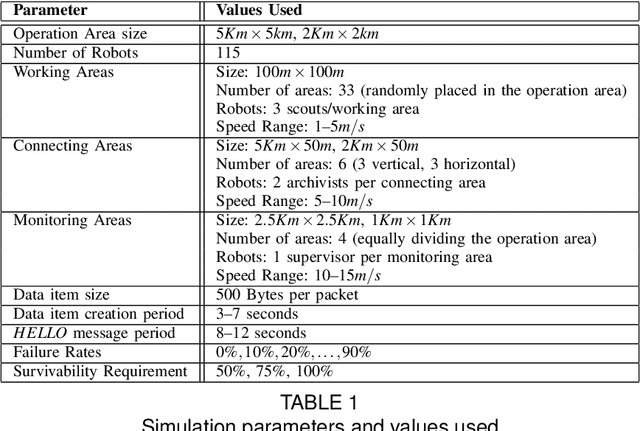
Mobile multi-robot teams deployed for monitoring or search-and-rescue missions in urban disaster areas can greatly improve the quality of vital data collected on-site. Analysis of such data can identify hazards and save lives. Unfortunately, such real deployments at scale are cost prohibitive and robot failures lead to data loss. Moreover, scaled-down deployments do not capture significant levels of interaction and communication complexity. To tackle this problem, we propose novel mobility and failure generation frameworks that allow realistic simulations of mobile robot networks for large scale disaster scenarios. Furthermore, since data replication techniques can improve the survivability of data collected during the operation, we propose an adaptive, scalable data replication technique that achieves high data survivability with low overhead. Our technique considers the anticipated robot failures and robot heterogeneity to decide how aggressively to replicate data. In addition, it considers survivability priorities, with some data requiring more effort to be saved than others. Using our novel simulation generation frameworks, we compare our adaptive technique with flooding and broadcast-based replication techniques and show that for failure rates of up to 60% it ensures better data survivability with lower communication costs.