 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Quality in Imitation Learning
Paper and Code


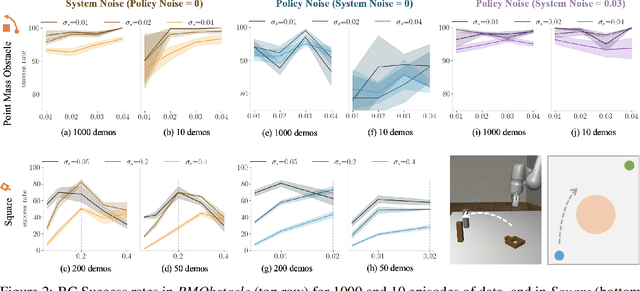

In supervised learning, the question of data quality and curation has been over-shadowed in recent years by increasingly more powerful and expressive models that can ingest internet-scale data. However, in offline learning for robotics, we simply lack internet scale data, and so high quality datasets are a necessity. This is especially true in imitation learning (IL), a sample efficient paradigm for robot learning using expert demonstrations. Policies learned through IL suffer from state distribution shift at test time due to compounding errors in action prediction, which leads to unseen states that the policy cannot recover from. Instead of designing new algorithms to address distribution shift, an alternative perspective is to develop new ways of assessing and curating datasets. There is growing evidence that the same IL algorithms can have substantially different performance across different datasets. This calls for a formalism for defining metrics of "data quality" that can further be leveraged for data curation. In this work, we take the first step toward formalizing data quality for imitation learning through the lens of distribution shift: a high quality dataset encourages the policy to stay in distribution at test time. We propose two fundamental properties that shape the quality of a dataset: i) action divergence: the mismatch between the expert and learned policy at certain states; and ii) transition diversity: the noise present in the system for a given state and action. We investigate the combined effect of these two key properties in imitation learning theoretically, and we empirically analyze models trained on a variety of different data sources. We show that state diversity is not always beneficial, and we demonstrate how action divergence and transition diversity interact in practice.