 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Freshness and Energy-Efficient UAV Navigation Optimization: A Deep Reinforcement Learning Approach
Paper and Code
Feb 21, 2020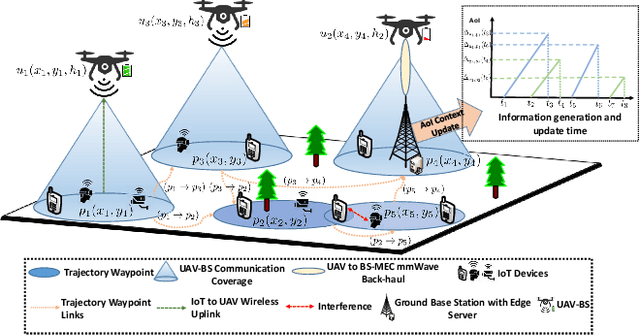
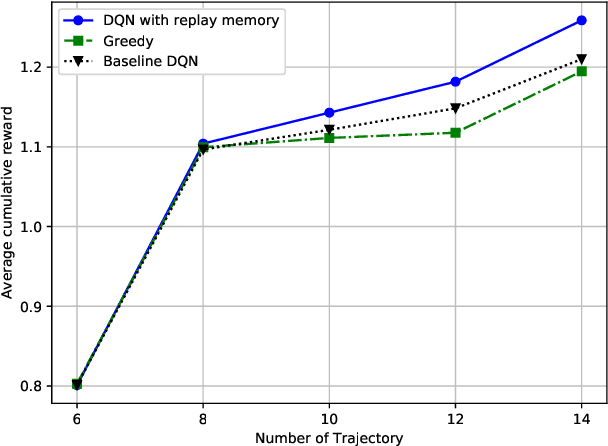
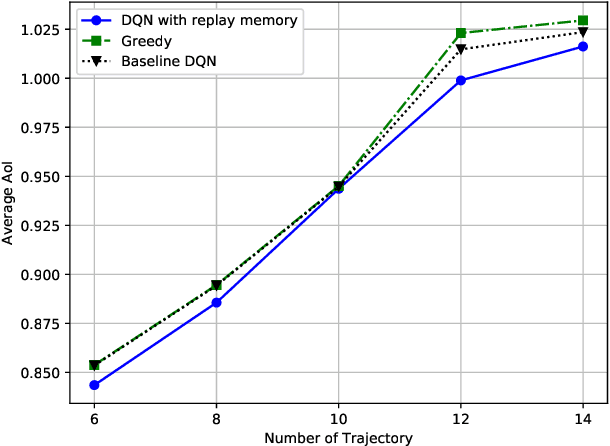
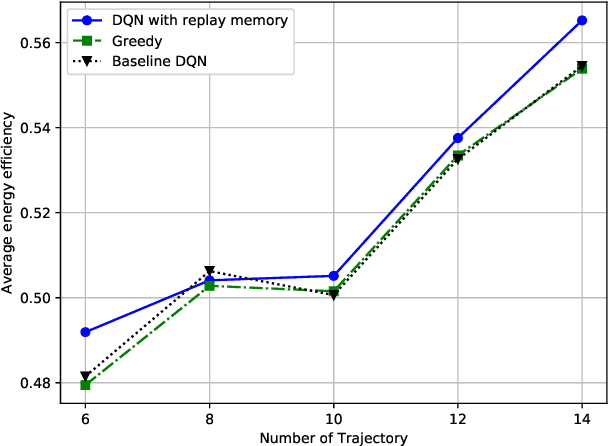
In this paper, we design a navigation policy for multiple unmanned aerial vehicles (UAVs) where mobile base stations (BSs) are deployed to improve the data freshness and connectivity to the Internet of Things (IoT) devices. First, we formulate an energy-efficient trajectory optimization problem in which the objective is to maximize the energy efficiency by optimizing the UAV-BS trajectory policy. We also incorporate different contextual information such as energy and age of information (AoI) constraints to ensure the data freshness at the ground BS. Second, we propose an agile deep reinforcement learning with experience replay model to solve the formulated problem concerning the contextual constraints for the UAV-BS navigation. Moreover, the proposed approach is well-suited for solving the problem, since the state space of the problem is extremely large and finding the best trajectory policy with useful contextual features is too complex for the UAV-BSs. By applying the proposed trained model, an effective real-time trajectory policy for the UAV-BSs captures the observable network states over time. Finally, the simulation results illustrate the proposed approach is 3.6% and 3.13% more energy efficient than those of the greedy and baseline deep Q Network (DQN) approaches.