 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Predictive Tracking Control based on Koopman Operators
Paper and Code
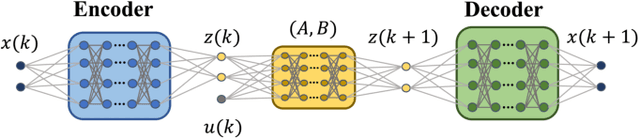
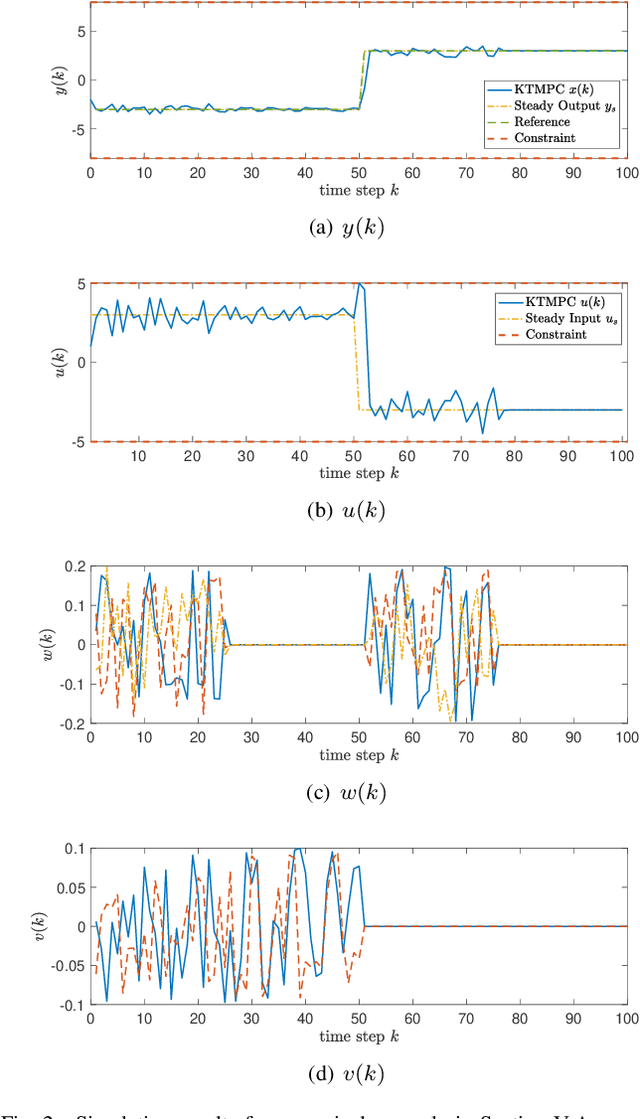
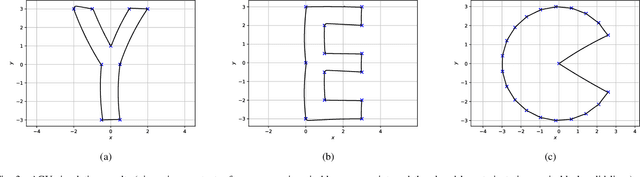
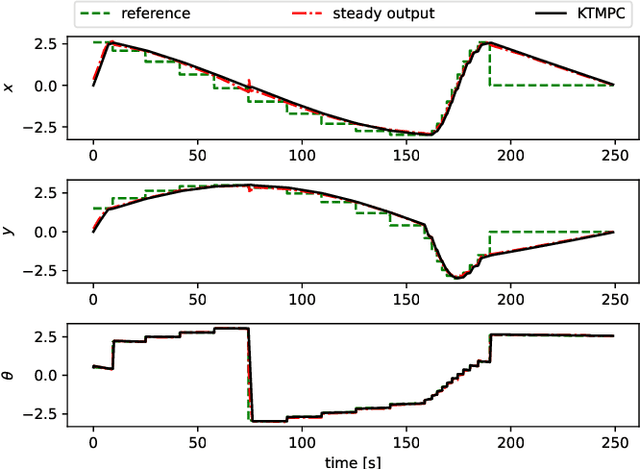
We seek to combine the nonlinear modeling capabilities of a wide class of neural networks with the safety guarantees of model predictive control (MPC) in a rigorous and online computationally tractable framework. The class of networks considered can be captured using Koopman operators, and are integrated into a Koopman-based tracking MPC (KTMPC) for nonlinear systems to track piecewise constant references. The effect of model mismatch between original nonlinear dynamics and its trained Koopman linear model is handled by using a constraint tightening approach in the proposed tracking MPC strategy. By choosing two Lyapunov candidate functions, we prove that solution is recursively feasible and input-to-state stable to a neighborhood of both online and offline optimal reachable steady outputs in the presence of bounded modeling errors. Finally, we show the results of a numerical example and an application of autonomous ground vehicle to track given references.