 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD2CoPlan: A Differentiable Decentralized Planner for Multi-Robot Coverage
Paper and Code
Sep 19, 2022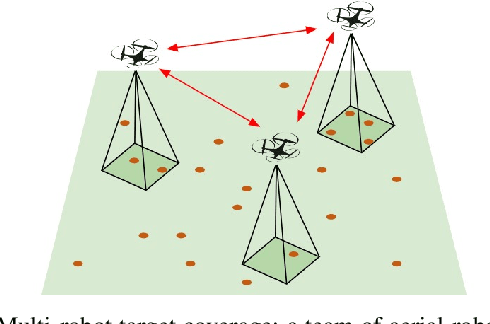
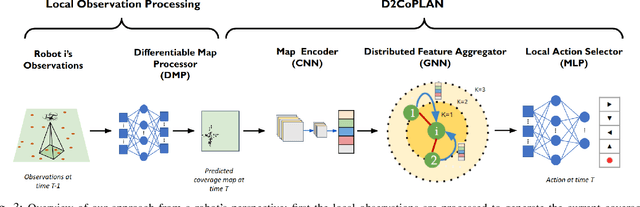
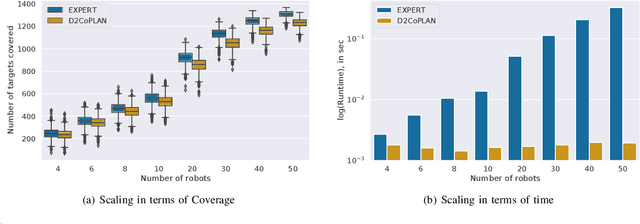
Centralized approaches for multi-robot coverage planning problems suffer from the lack of scalability. Learning-based distributed algorithms provide a scalable avenue in addition to bringing data-oriented feature generation capabilities to the table, allowing integration with other learning-based approaches. To this end, we present a learning-based, differentiable distributed coverage planner (D2COPL A N) which scales efficiently in runtime and number of agents compared to the expert algorithm, and performs on par with the classical distributed algorithm. In addition, we show that D2COPlan can be seamlessly combined with other learning methods to learn end-to-end, resulting in a better solution than the individually trained modules, opening doors to further research for tasks that remain elusive with classical methods.