 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCTP-Net For Cross-Domain Trajectory Prediction
Paper and Code
Oct 22, 2021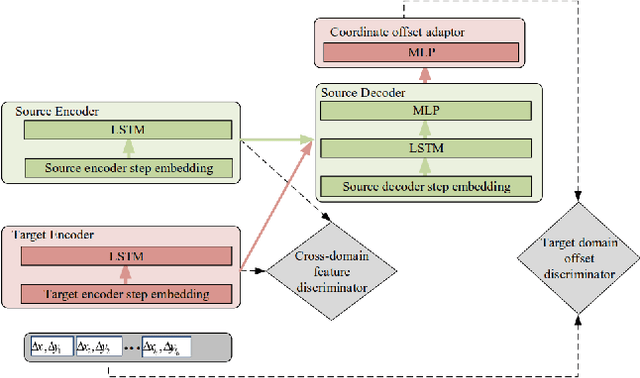


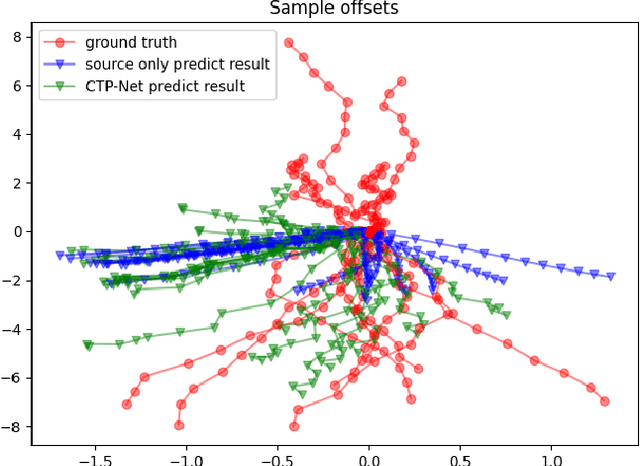
Deep learning based trajectory prediction methods rely on large amount of annotated future trajectories, but may not generalize well to a new scenario captured by another camera. Meanwhile, annotating trajectories for training a network for this new scenario is time-consuming and expensive, therefore it is desirable to adapt the model trained with the annotated source domain trajectories to the target domain. To tackle domain adaptation for trajectory prediction, we propose a Cross-domain Trajectory Prediction Network (CTP-Net), in which LSTMs are used to encode the observed trajectories of both domain, and their features are aligned by a cross-domain feature discriminator. Further, considering the consistency between the observed trajectories and the predicted trajectories in the target domain, a target domain offset discriminator is utilized to adversarially regularize the future trajectory predictions to be consistent with the observed trajectories. Extensive experiments demonstrate the effectiveness of the proposed domain adaptation for trajectory prediction setting as well as our method on domain adaptation for trajectory prediction.