 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross Scene Prediction via Modeling Dynamic Correlation using Latent Space Shared Auto-Encoders
Paper and Code
Mar 31, 2020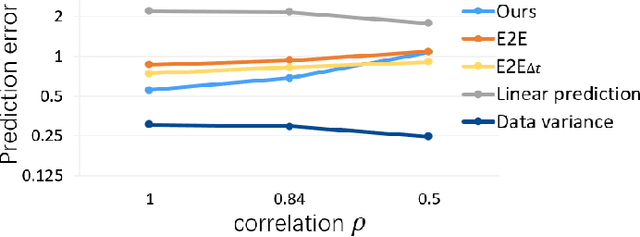
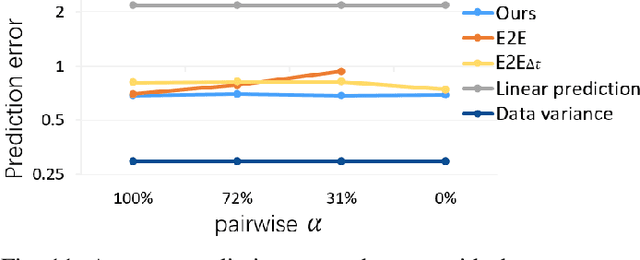
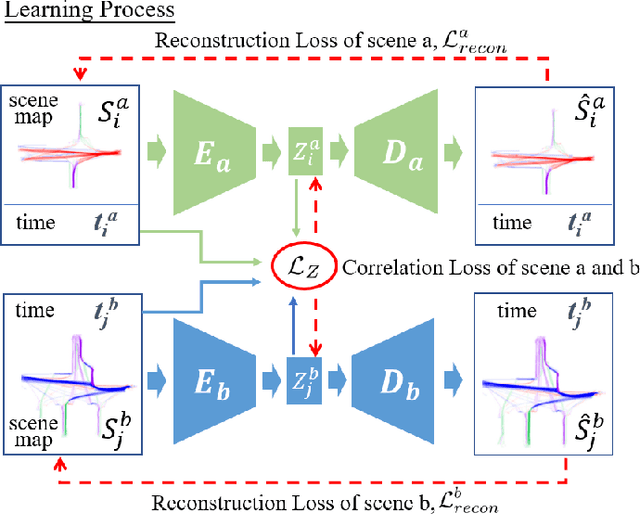
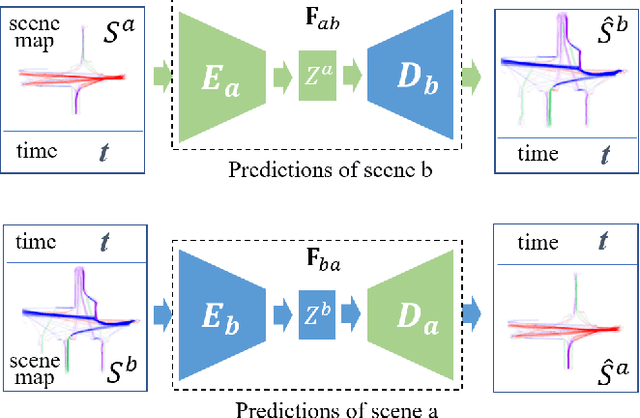
This work addresses on the following problem: given a set of unsynchronized history observations of two scenes that are correlative on their dynamic changes, the purpose is to learn a cross-scene predictor, so that with the observation of one scene, a robot can onlinely predict the dynamic state of another. A method is proposed to solve the problem via modeling dynamic correlation using latent space shared auto-encoders. Assuming that the inherent correlation of scene dynamics can be represented by shared latent space, where a common latent state is reached if the observations of both scenes are at an approximate time, a learning model is developed by connecting two auto-encoders through the latent space, and a prediction model is built by concatenating the encoder of the input scene with the decoder of the target one. Simulation datasets are generated imitating the dynamic flows at two adjacent gates of a campus, where the dynamic changes are triggered by a common working and teaching schedule. Similar scenarios can also be found at successive intersections on a single road, gates of a subway station, etc. Accuracy of cross-scene prediction is examined at various conditions of scene correlation and pairwise observations. Potentials of the proposed method are demonstrated by comparing with conventional end-to-end methods and linear predictions.