 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-domain Federated Object Detection
Paper and Code
Jun 30, 2022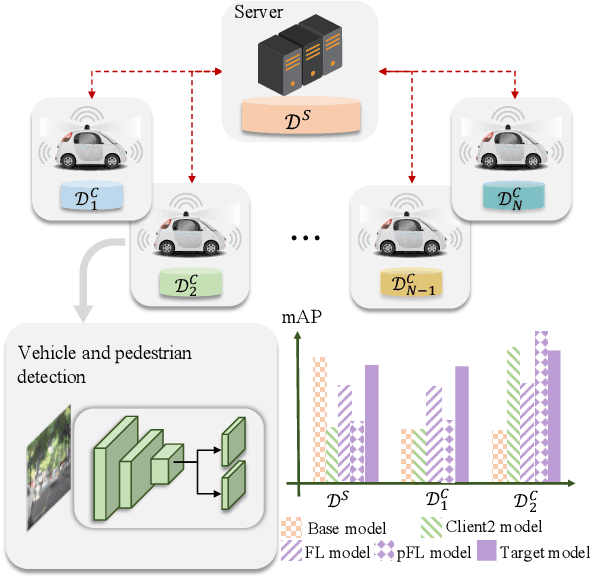
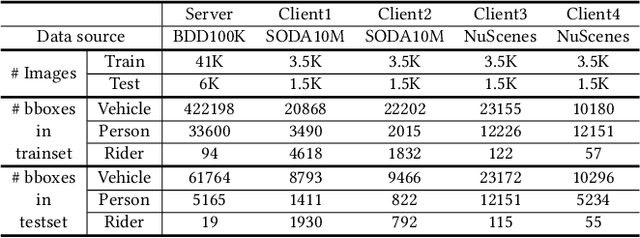
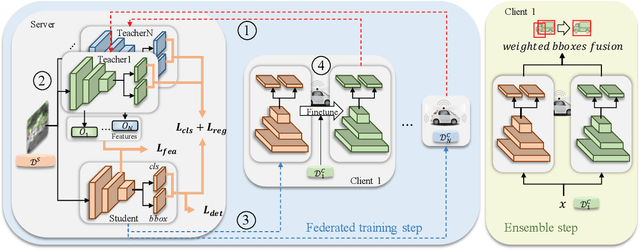
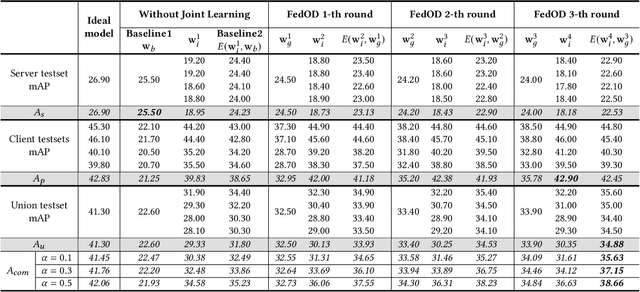
Detection models trained by one party (server) may face severe performance degradation when distributed to other users (clients). For example, in autonomous driving scenarios, different driving environments may bring obvious domain shifts, which lead to biases in model predictions. Federated learning that has emerged in recent years can enable multi-party collaborative training without leaking client data. In this paper, we focus on a special cross-domain scenario where the server contains large-scale data and multiple clients only contain a small amount of data; meanwhile, there exist differences in data distributions among the clients. In this case, traditional federated learning techniques cannot take into account the learning of both the global knowledge of all participants and the personalized knowledge of a specific client. To make up for this limitation, we propose a cross-domain federated object detection framework, named FedOD. In order to learn both the global knowledge and the personalized knowledge in different domains, the proposed framework first performs the federated training to obtain a public global aggregated model through multi-teacher distillation, and sends the aggregated model back to each client for finetuning its personalized local model. After very few rounds of communication, on each client we can perform weighted ensemble inference on the public global model and the personalized local model. With the ensemble, the generalization performance of the client-side model can outperform a single model with the same parameter scale. We establish a federated object detection dataset which has significant background differences and instance differences based on multiple public autonomous driving datasets, and then conduct extensive experiments on the dataset. The experimental results validate the effectiveness of the proposed method.