 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrespondence-Free Point Cloud Registration with SO(3)-Equivariant Implicit Shape Representations
Paper and Code
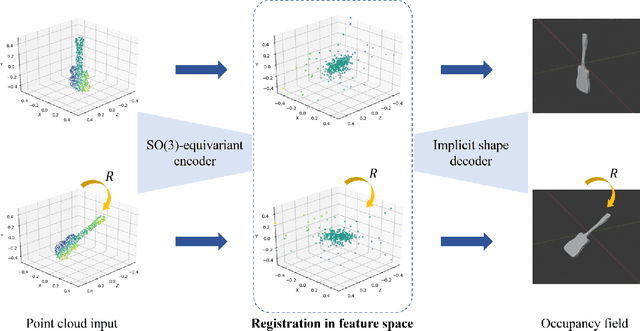
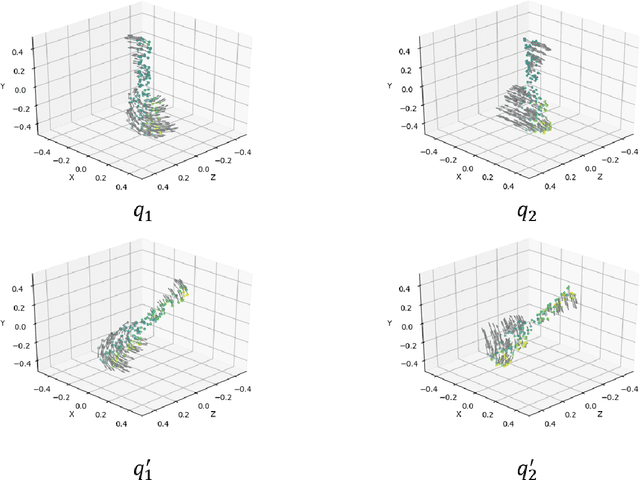

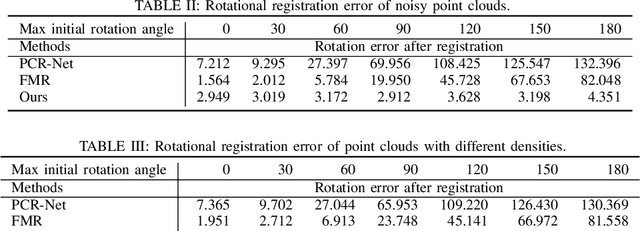
This paper proposes a correspondence-free method for point cloud rotational registration. We learn an embedding for each point cloud in a feature space that preserves the SO(3)-equivariance property, enabled by recent developments in equivariant neural networks. The proposed shape registration method achieves three major advantages through combining equivariant feature learning with implicit shape models. First, the necessity of data association is removed because of the permutation-invariant property in network architectures similar to PointNet. Second, the registration in feature space can be solved in closed-form using Horn's method due to the SO(3)-equivariance property. Third, the registration is robust to noise in the point cloud because of implicit shape learning. The experimental results show superior performance compared with existing correspondence-free deep registration methods.