 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Behavioral Planning for Automated Driving using Graph Neural Networks
Paper and Code
Feb 23, 2022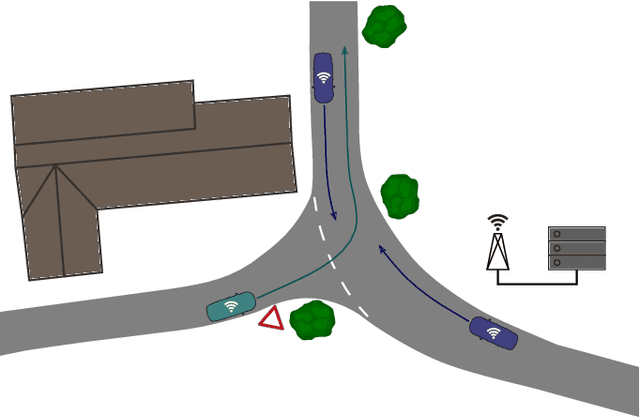
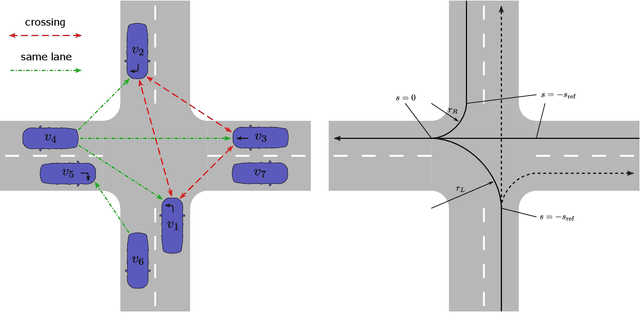
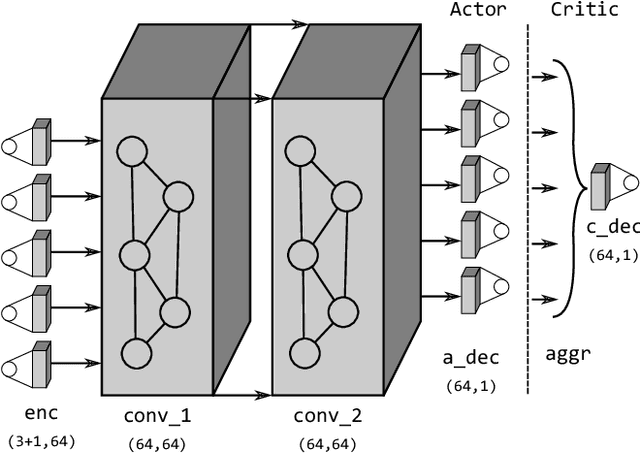
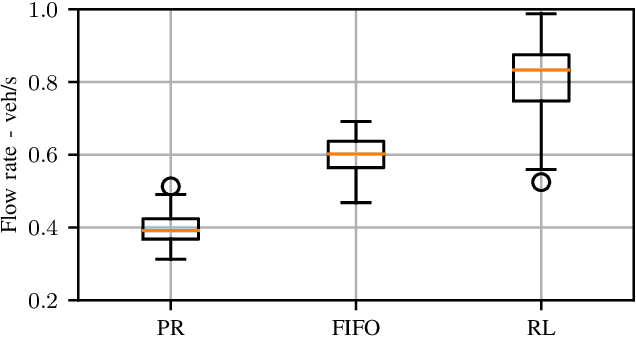
Urban intersections are prone to delays and inefficiencies due to static precedence rules and occlusions limiting the view on prioritized traffic. Existing approaches to improve traffic flow, widely known as automatic intersection management systems, are mostly based on non-learning reservation schemes or optimization algorithms. Machine learning-based techniques show promising results in planning for a single ego vehicle. This work proposes to leverage machine learning algorithms to optimize traffic flow at urban intersections by jointly planning for multiple vehicles. Learning-based behavior planning poses several challenges, demanding for a suited input and output representation as well as large amounts of ground-truth data. We address the former issue by using a flexible graph-based input representation accompanied by a graph neural network. This allows to efficiently encode the scene and inherently provide individual outputs for all involved vehicles. To learn a sensible policy, without relying on the imitation of expert demonstrations, the cooperative planning task is phrased as a reinforcement learning problem. We train and evaluate the proposed method in an open-source simulation environment for decision making in automated driving. Compared to a first-in-first-out scheme and traffic governed by static priority rules, the learned planner shows a significant gain in flow rate, while reducing the number of induced stops. In addition to synthetic simulations, the approach is also evaluated based on real-world traffic data taken from the publicly available inD dataset.