 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative and Distributed Reinforcement Learning of Drones for Field Coverage
Paper and Code
Sep 16, 2018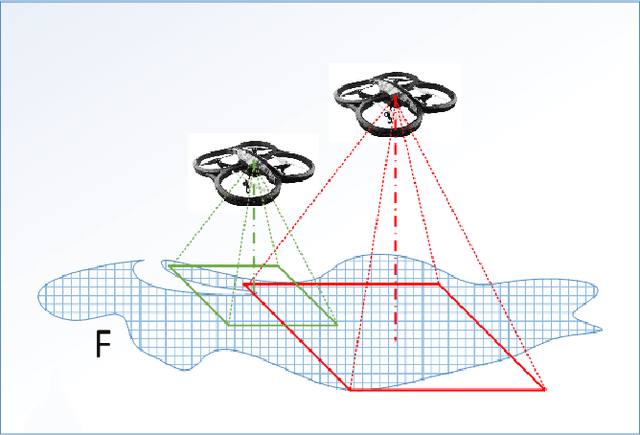
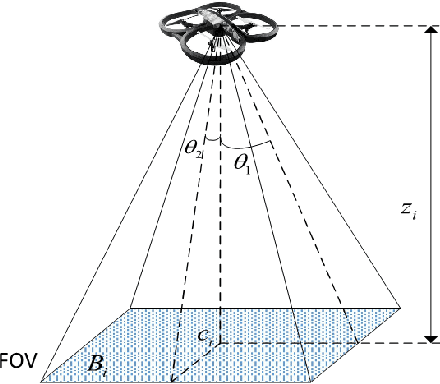
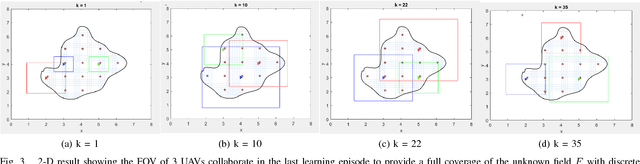
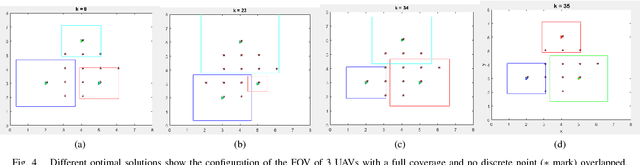
This paper proposes a distributed Multi-Agent Reinforcement Learning (MARL) algorithm for a team of Unmanned Aerial Vehicles (UAVs). The proposed MARL algorithm allows UAVs to learn cooperatively to provide a full coverage of an unknown field of interest while minimizing the overlapping sections among their field of views. Two challenges in MARL for such a system are discussed in the paper: firstly, the complex dynamic of the joint-actions of the UAV team, that will be solved using game-theoretic correlated equilibrium, and secondly, the challenge in huge dimensional state space representation will be tackled with efficient function approximation techniques. We also provide our experimental results in detail with both simulation and physical implementation to show that the UAV team can successfully learn to accomplish the task.