 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Relaxations for Consensus and Non-Minimal Problems in 3D Vision
Paper and Code
Sep 26, 2019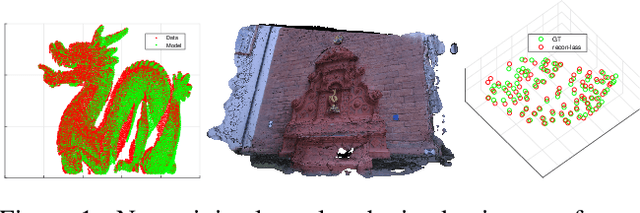
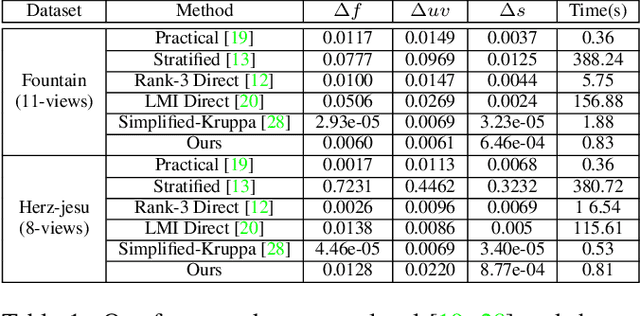
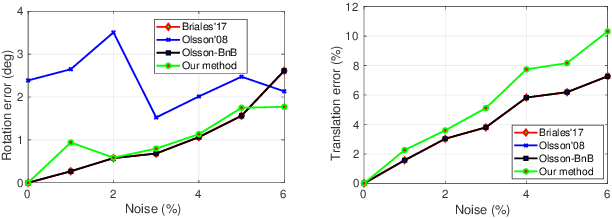
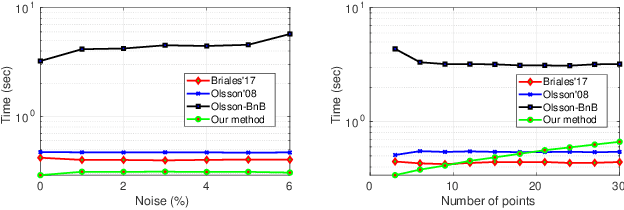
In this paper, we formulate a generic non-minimal solver using the existing tools of Polynomials Optimization Problems (POP) from computational algebraic geometry. The proposed method exploits the well known Shor's or Lasserre's relaxations, whose theoretical aspects are also discussed. Notably, we further exploit the POP formulation of non-minimal solver also for the generic consensus maximization problems in 3D vision. Our framework is simple and straightforward to implement, which is also supported by three diverse applications in 3D vision, namely rigid body transformation estimation, Non-Rigid Structure-from-Motion (NRSfM), and camera autocalibration. In all three cases, both non-minimal and consensus maximization are tested, which are also compared against the state-of-the-art methods. Our results are competitive to the compared methods, and are also coherent with our theoretical analysis. The main contribution of this paper is the claim that a good approximate solution for many polynomial problems involved in 3D vision can be obtained using the existing theory of numerical computational algebra. This claim leads us to reason about why many relaxed methods in 3D vision behave so well? And also allows us to offer a generic relaxed solver in a rather straightforward way. We further show that the convex relaxation of these polynomials can easily be used for maximizing consensus in a deterministic manner. We support our claim using several experiments for aforementioned three diverse problems in 3D vision.