Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Parameterizations and Fidelity Bounds for Nonlinear Identification and Reduced-Order Modelling
Paper and Code
Jan 23, 2017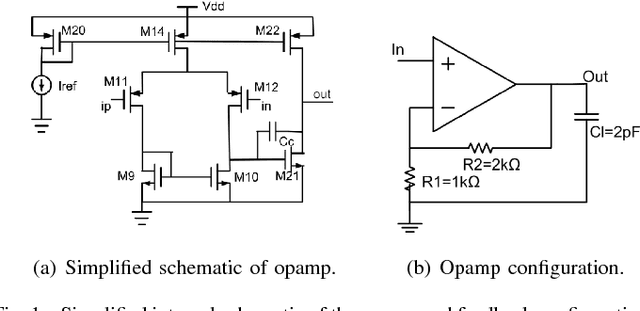
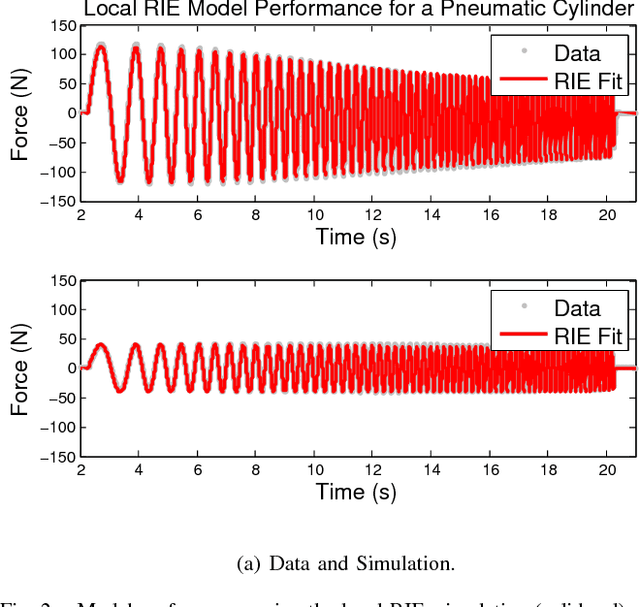


Model instability and poor prediction of long-term behavior are common problems when modeling dynamical systems using nonlinear "black-box" techniques. Direct optimization of the long-term predictions, often called simulation error minimization, leads to optimization problems that are generally non-convex in the model parameters and suffer from multiple local minima. In this work we present methods which address these problems through convex optimization, based on Lagrangian relaxation, dissipation inequalities, contraction theory, and semidefinite programming. We demonstrate the proposed methods with a model order reduction task for electronic circuit design and the identification of a pneumatic actuator from experiment.
* Conditionally accepted to IEEE TAC
View paper on