 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContributions of Shape, Texture, and Color in Visual Recognition
Paper and Code

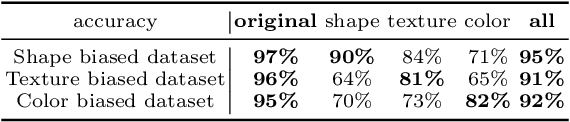
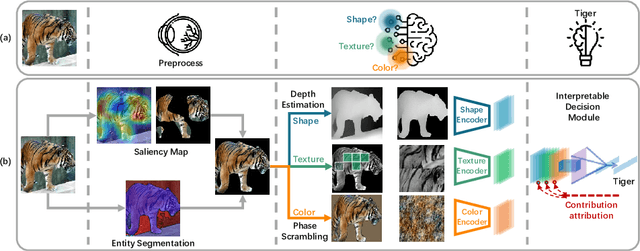

We investigate the contributions of three important features of the human visual system (HVS)~ -- ~shape, texture, and color ~ -- ~to object classification. We build a humanoid vision engine (HVE) that explicitly and separately computes shape, texture, and color features from images. The resulting feature vectors are then concatenated to support the final classification. We show that HVE can summarize and rank-order the contributions of the three features to object recognition. We use human experiments to confirm that both HVE and humans predominantly use some specific features to support the classification of specific classes (e.g., texture is the dominant feature to distinguish a zebra from other quadrupeds, both for humans and HVE). With the help of HVE, given any environment (dataset), we can summarize the most important features for the whole task (task-specific; e.g., color is the most important feature overall for classification with the CUB dataset), and for each class (class-specific; e.g., shape is the most important feature to recognize boats in the iLab-20M dataset). To demonstrate more usefulness of HVE, we use it to simulate the open-world zero-shot learning ability of humans with no attribute labeling. Finally, we show that HVE can also simulate human imagination ability with the combination of different features. We will open-source the HVE engine and corresponding datasets.