 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Monte Carlo Graph Search
Paper and Code
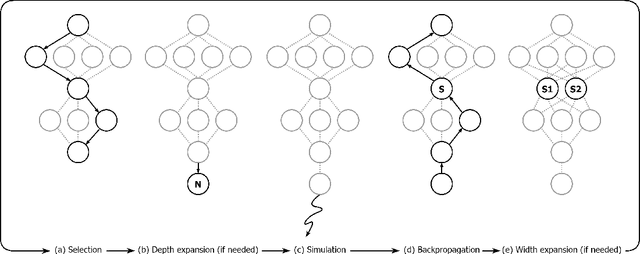
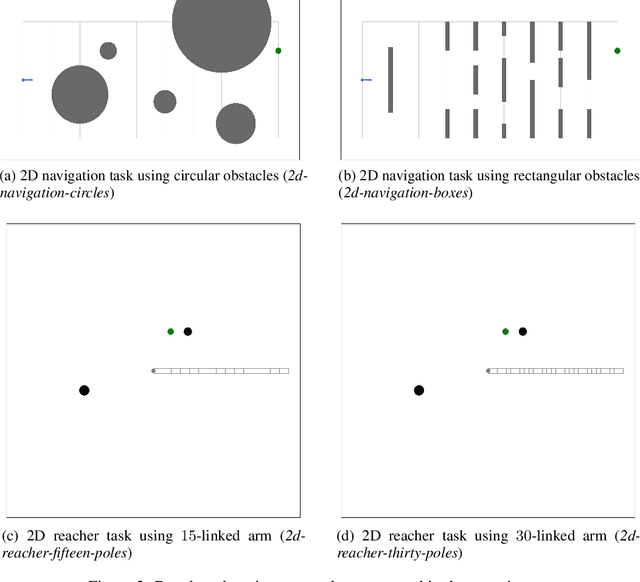
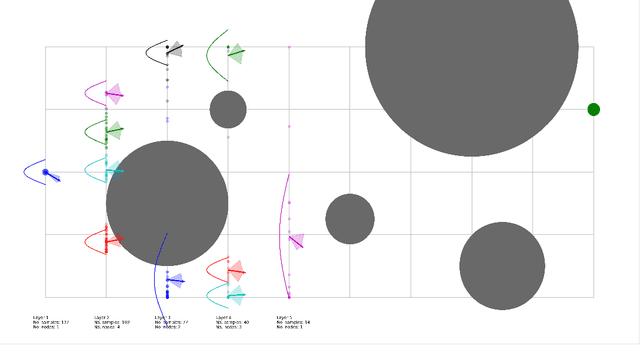
In many complex sequential decision making tasks, online planning is crucial for high-performance. For efficient online planning, Monte Carlo Tree Search (MCTS) employs a principled mechanism for trading off between exploration and exploitation. MCTS outperforms comparison methods in various discrete decision making domains such as Go, Chess, and Shogi. Following, extensions of MCTS to continuous domains have been proposed. However, the inherent high branching factor and the resulting explosion of search tree size is limiting existing methods. To solve this problem, this paper proposes Continuous Monte Carlo Graph Search (CMCGS), a novel extension of MCTS to online planning in environments with continuous state and action spaces. CMCGS takes advantage of the insight that, during planning, sharing the same action policy between several states can yield high performance. To implement this idea, at each time step CMCGS clusters similar states into a limited number of stochastic action bandit nodes, which produce a layered graph instead of an MCTS search tree. Experimental evaluation with limited sample budgets shows that CMCGS outperforms comparison methods in several complex continuous DeepMind Control Suite benchmarks and a 2D navigation task.