 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Multi-Robot Learning from Black-Box Visual Place Recognition Models
Paper and Code
Mar 04, 2025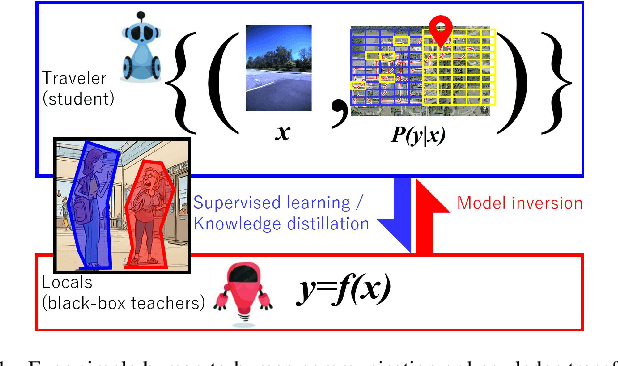
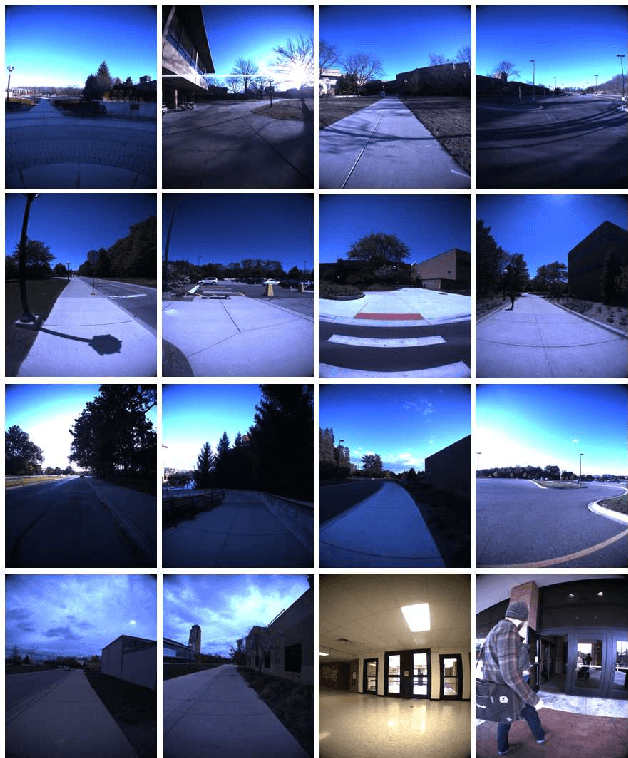
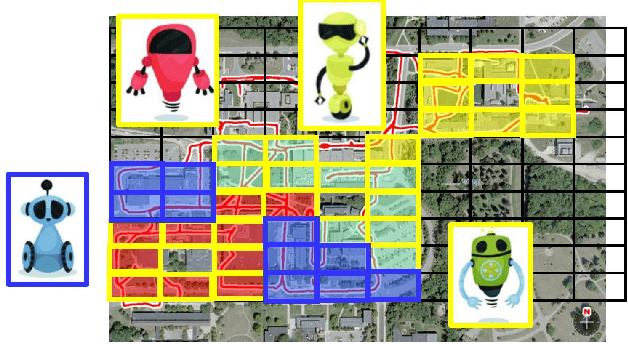
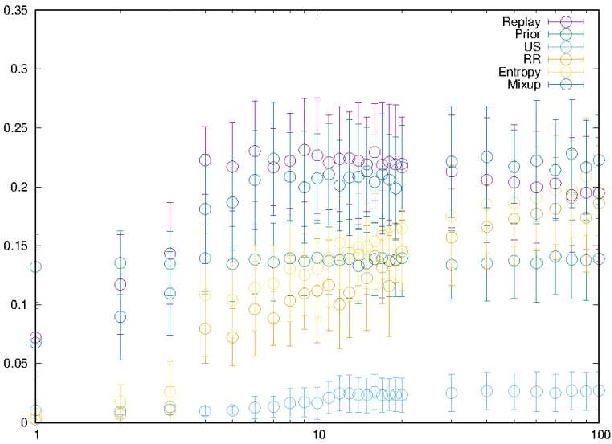
In the context of visual place recognition (VPR), continual learning (CL) techniques offer significant potential for avoiding catastrophic forgetting when learning new places. However, existing CL methods often focus on knowledge transfer from a known model to a new one, overlooking the existence of unknown black-box models. We explore a novel multi-robot CL approach that enables knowledge transfer from black-box VPR models (teachers), such as those of local robots encountered by traveler robots (students) in unknown environments. Specifically, we introduce Membership Inference Attack, or MIA, the only major privacy attack applicable to black-box models, and leverage it to reconstruct pseudo training sets, which serve as the key knowledge to be exchanged between robots, from black-box VPR models. Furthermore, we aim to overcome the inherently low sampling efficiency of MIA by leveraging insights on place class prediction distribution and un-learned class detection imported from the VPR literature as a prior distribution. We also analyze both the individual effects of these methods and their combined impact. Experimental results demonstrate that our black-box MIA (BB-MIA) approach is remarkably powerful despite its simplicity, significantly enhancing the VPR capability of lower-performing robots through brief communication with other robots. This study contributes to optimizing knowledge sharing between robots in VPR and enhancing autonomy in open-world environments with multi-robot systems that are fault-tolerant and scalable.