 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Learning in Low-rank Orthogonal Subspaces
Paper and Code
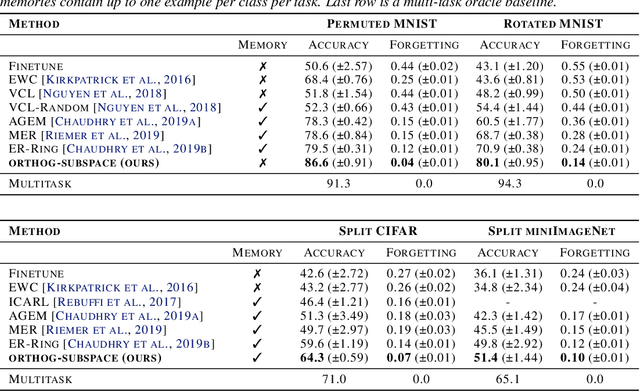
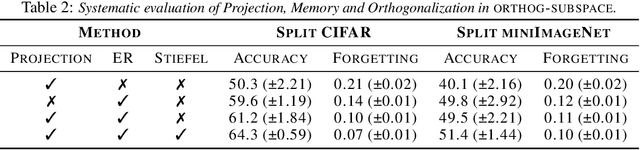
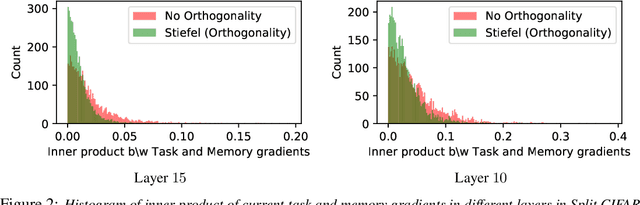
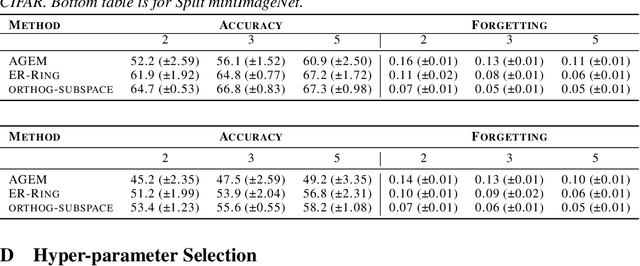
In continual learning (CL), a learner is faced with a sequence of tasks, arriving one after the other, and the goal is to remember all the tasks once the continual learning experience is finished. The prior art in CL uses episodic memory, parameter regularization or extensible network structures to reduce interference among tasks, but in the end, all the approaches learn different tasks in a joint vector space. We believe this invariably leads to interference among different tasks. We propose to learn tasks in different (low-rank) vector subspaces that are kept orthogonal to each other in order to minimize interference. Further, to keep the gradients of different tasks coming from these subspaces orthogonal to each other, we learn isometric mappings by posing network training as an optimization problem over the Stiefel manifold. To the best of our understanding, we report, for the first time, strong results over experience-replay baseline with and without memory on standard classification benchmarks in continual learning. The code is made publicly available.