 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Learning for Image-Based Camera Localization
Paper and Code
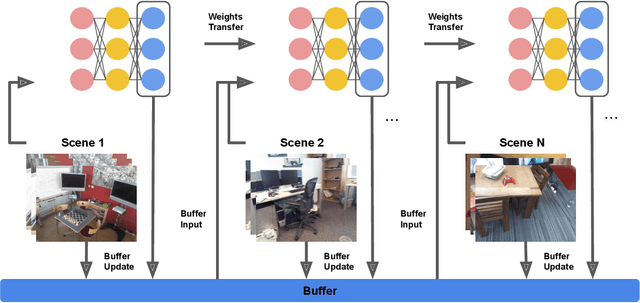

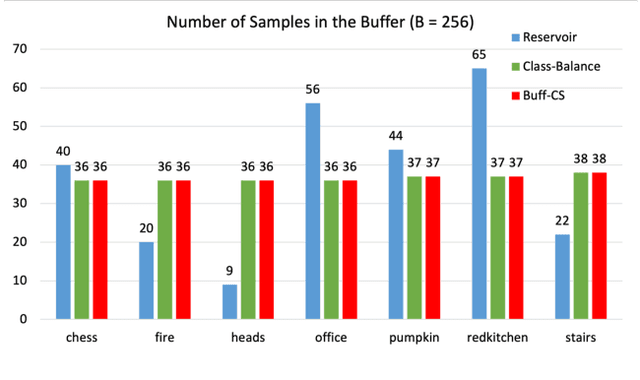

For several emerging technologies such as augmented reality, autonomous driving and robotics, visual localization is a critical component. Directly regressing camera pose/3D scene coordinates from the input image using deep neural networks has shown great potential. However, such methods assume a stationary data distribution with all scenes simultaneously available during training. In this paper, we approach the problem of visual localization in a continual learning setup -- whereby the model is trained on scenes in an incremental manner. Our results show that similar to the classification domain, non-stationary data induces catastrophic forgetting in deep networks for visual localization. To address this issue, a strong baseline based on storing and replaying images from a fixed buffer is proposed. Furthermore, we propose a new sampling method based on coverage score (Buff-CS) that adapts the existing sampling strategies in the buffering process to the problem of visual localization. Results demonstrate consistent improvements over standard buffering methods on two challenging datasets -- 7Scenes, 12Scenes, and also 19Scenes by combining the former scenes.