Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact modelling and tactile data processing for robot skin
Paper and Code
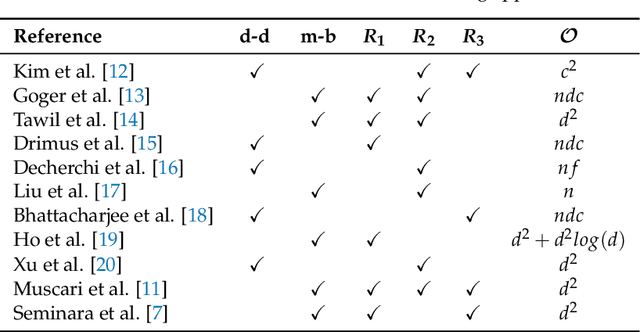

Tactile sensing is a key enabling technology to develop complex behaviours for robots interacting with humans or the environment. This paper discusses computational aspects playing a significant role when extracting information about contact events. Considering a large-scale, capacitance-based robot skin technology we developed in the past few years, we analyse the classical Boussinesq-Cerruti's solution and the Love's approach for solving a distributed inverse contact problem, both from a qualitative and a computational perspective. Our contribution is the characterisation of algorithms performance using a freely available dataset and data originating from surfaces provided with robot skin.
* Submitted to Robotics and Autonomous Systems
View paper on