 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnecting Visual Experiences using Max-flow Network with Application to Visual Localization
Paper and Code
Aug 01, 2018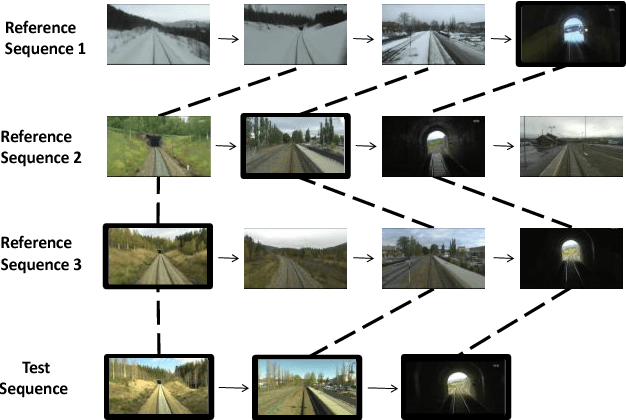

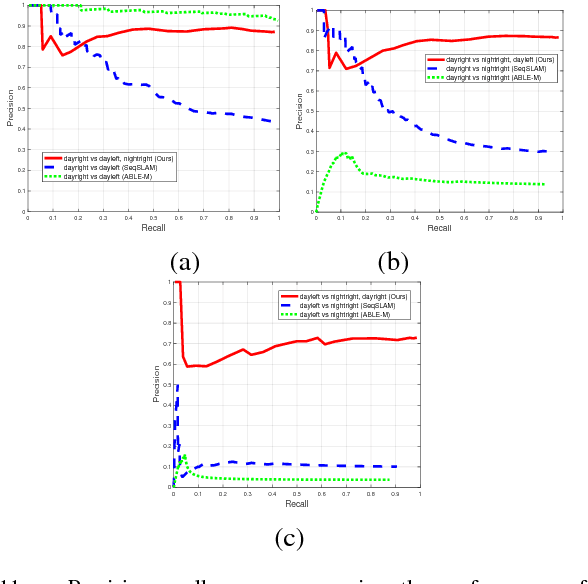
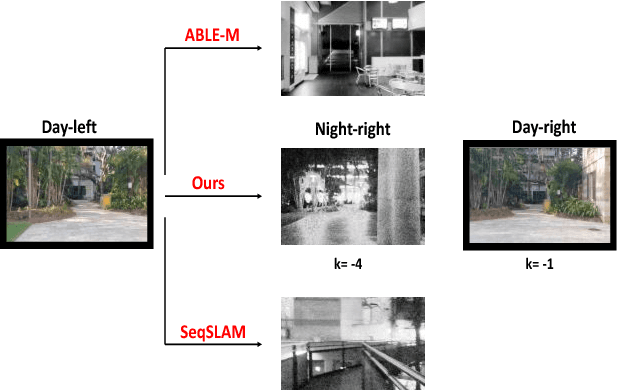
We are motivated by the fact that multiple representations of the environment are required to stand for the changes in appearance with time and for changes that appear in a cyclic manner. These changes are, for example, from day to night time, and from day to day across seasons. In such situations, the robot visits the same routes multiple times and collects different appearances of it. Multiple visual experiences usually find robotic vision applications like visual localization, mapping, place recognition, and autonomous navigation. The novelty in this paper is an algorithm that connects multiple visual experiences via aligning multiple image sequences. This problem is solved by finding the maximum flow in a directed graph flow-network, whose vertices represent the matches between frames in the test and reference sequences. Edges of the graph represent the cost of these matches. The problem of finding the best match is reduced to finding the minimum-cut surface, which is solved as a maximum flow network problem. Application to visual localization is considered in this paper to show the effectiveness of the proposed multiple image sequence alignment method, without loosing its generality. Experimental evaluations show that the precision of sequence matching is improved by considering multiple visual sequences for the same route, and that the method performs favorably against state-of-the-art single representation methods like SeqSLAM and ABLE-M.