 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfiguration Space Decomposition for Scalable Proxy Collision Checking in Robot Planning and Control
Paper and Code
Jan 26, 2022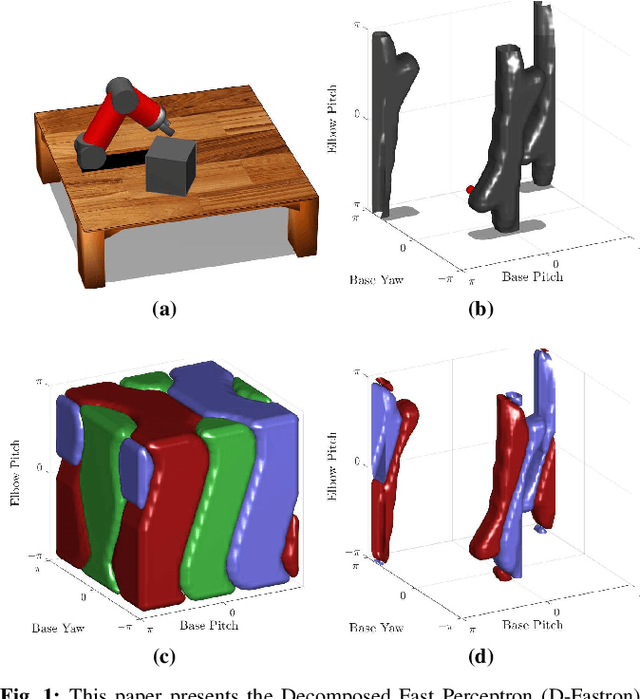
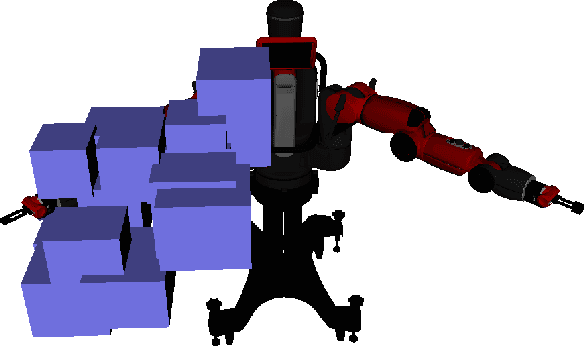
Real-time robot motion planning in complex high-dimensional environments remains an open problem. Motion planning algorithms, and their underlying collision checkers, are crucial to any robot control stack. Collision checking takes up a large portion of the computational time in robot motion planning. Existing collision checkers make trade-offs between speed and accuracy and scale poorly to high-dimensional, complex environments. We present a novel space decomposition method using K-Means clustering in the Forward Kinematics space to accelerate proxy collision checking. We train individual configuration space models using Fastron, a kernel perceptron algorithm, on these decomposed subspaces, yielding compact yet highly accurate models that can be queried rapidly and scale better to more complex environments. We demonstrate this new method, called Decomposed Fast Perceptron (D-Fastron), on the 7-DOF Baxter robot producing on average 29x faster collision checks and up to 9.8x faster motion planning compared to state-of-the-art geometric collision checkers.