 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfidence Guided Stereo 3D Object Detection with Split Depth Estimation
Paper and Code
Mar 11, 2020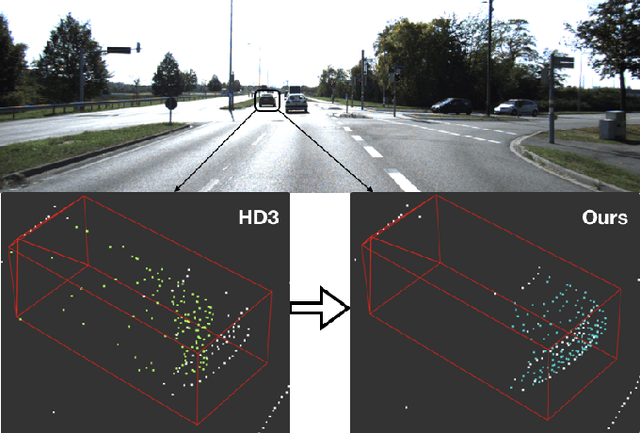
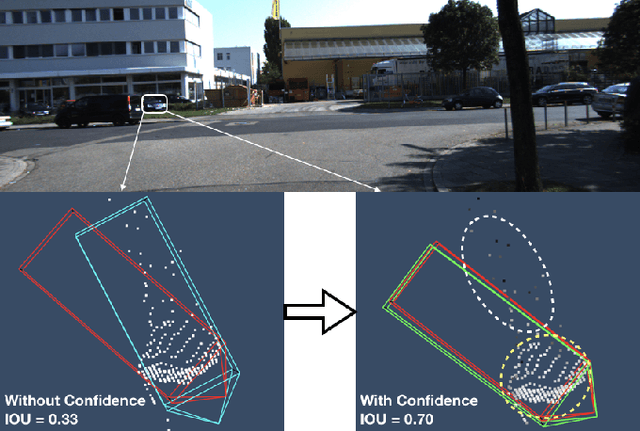
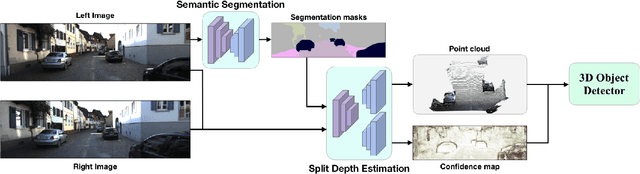
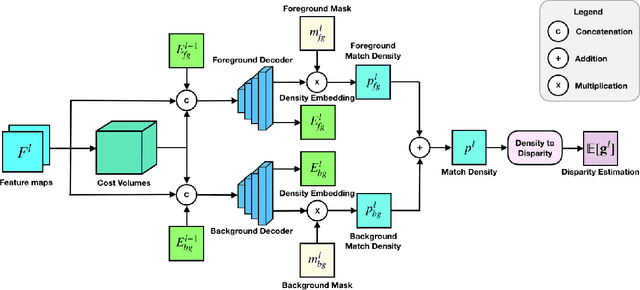
Accurate and reliable 3D object detection is vital to safe autonomous driving. Despite recent developments, the performance gap between stereo-based methods and LiDAR-based methods is still considerable. Accurate depth estimation is crucial to the performance of stereo-based 3D object detection methods, particularly for those pixels associated with objects in the foreground. Moreover, stereo-based methods suffer from high variance in the depth estimation accuracy, which is often not considered in the object detection pipeline. To tackle these two issues, we propose CG-Stereo, a confidence-guided stereo 3D object detection pipeline that uses separate decoders for foreground and background pixels during depth estimation, and leverages the confidence estimation from the depth estimation network as a soft attention mechanism in the 3D object detector. Our approach outperforms all state-of-the-art stereo-based 3D detectors on the KITTI benchmark.