 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConDaFormer: Disassembled Transformer with Local Structure Enhancement for 3D Point Cloud Understanding
Paper and Code
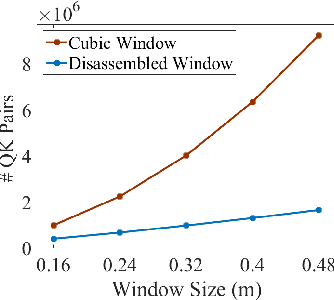
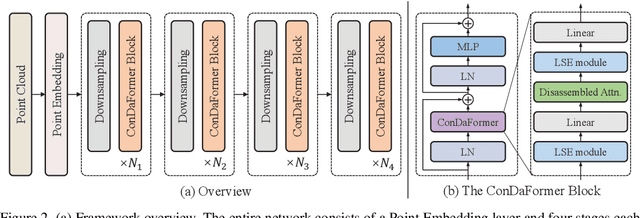
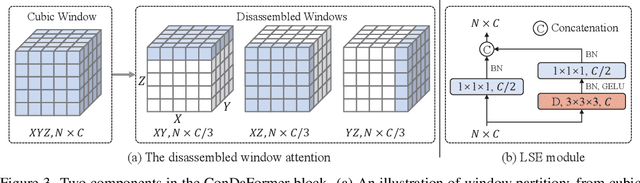
Transformers have been recently explored for 3D point cloud understanding with impressive progress achieved. A large number of points, over 0.1 million, make the global self-attention infeasible for point cloud data. Thus, most methods propose to apply the transformer in a local region, e.g., spherical or cubic window. However, it still contains a large number of Query-Key pairs, which requires high computational costs. In addition, previous methods usually learn the query, key, and value using a linear projection without modeling the local 3D geometric structure. In this paper, we attempt to reduce the costs and model the local geometry prior by developing a new transformer block, named ConDaFormer. Technically, ConDaFormer disassembles the cubic window into three orthogonal 2D planes, leading to fewer points when modeling the attention in a similar range. The disassembling operation is beneficial to enlarging the range of attention without increasing the computational complexity, but ignores some contexts. To provide a remedy, we develop a local structure enhancement strategy that introduces a depth-wise convolution before and after the attention. This scheme can also capture the local geometric information. Taking advantage of these designs, ConDaFormer captures both long-range contextual information and local priors. The effectiveness is demonstrated by experimental results on several 3D point cloud understanding benchmarks. Code is available at https://github.com/LHDuan/ConDaFormer .