Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing Coordinated Motion Plans for Robot Swarms: The CG:SHOP Challenge 2021
Paper and Code
Mar 29, 2021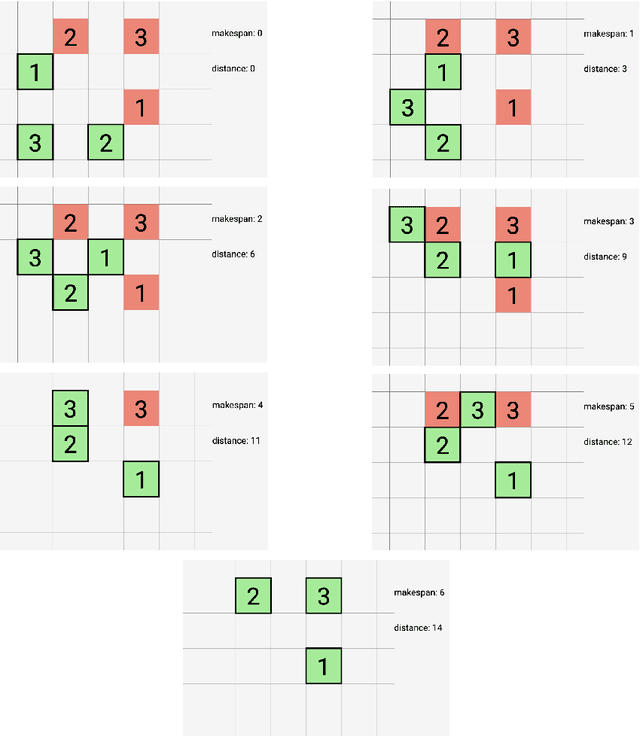
We give an overview of the 2021 Computational Geometry Challenge, which targeted the problem of optimally coordinating a set of robots by computing a family of collision-free trajectories for a set set S of n pixel-shaped objects from a given start configuration into a desired target configuration.
* 13 pages, 8 figures, 2 tables
View paper on