 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Scalable Object SLAM
Paper and Code
Nov 05, 2020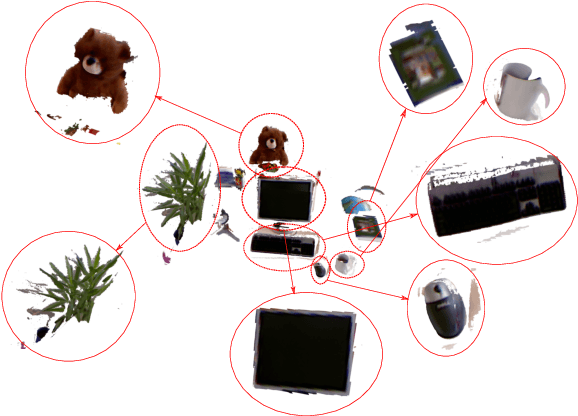
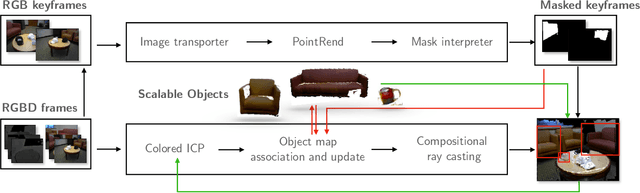


We present a fast, scalable, and accurate Simultaneous Localization and Mapping (SLAM) system that represents indoor scenes as a graph of objects. Leveraging the observation that artificial environments are structured and occupied by recognizable objects, we show that a compositional scalable object mapping formulation is amenable to a robust SLAM solution for drift-free large scale indoor reconstruction. To achieve this, we propose a novel semantically assisted data association strategy that obtains unambiguous persistent object landmarks, and a 2.5D compositional rendering method that enables reliable frame-to-model RGB-D tracking. Consequently, we deliver an optimized online implementation that can run at near frame rate with a single graphics card, and provide a comprehensive evaluation against state of the art baselines. An open source implementation will be provided at https://placeholder.