 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompliant Control of Quadruped Robots for Assistive Load Carrying
Paper and Code
Mar 13, 2025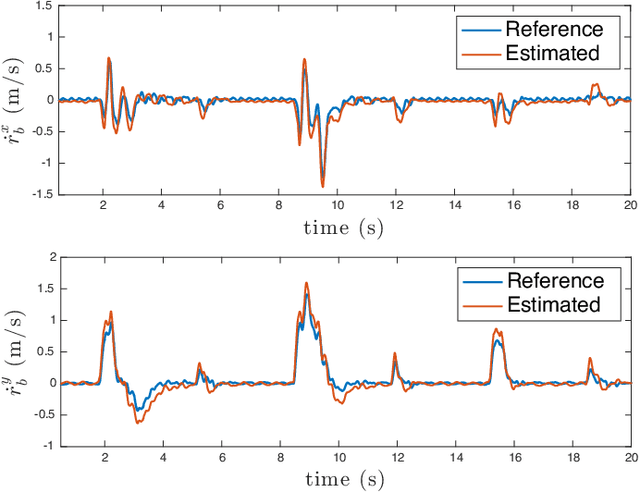
This paper presents a novel method for assistive load carrying using quadruped robots. The controller uses proprioceptive sensor data to estimate external base wrench, that is used for precise control of the robot's acceleration during payload transport. The acceleration is controlled using a combination of admittance control and Control Barrier Function (CBF) based quadratic program (QP). The proposed controller rejects disturbances and maintains consistent performance under varying load conditions. Additionally, the built-in CBF guarantees collision avoidance with the collaborative agent in front of the robot. The efficacy of the overall controller is shown by its implementation on the physical hardware as well as numerical simulations. The proposed control framework aims to enhance the quadruped robot's ability to perform assistive tasks in various scenarios, from industrial applications to search and rescue operations.