 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompleting Partial Point Clouds with Outliers by Collaborative Completion and Segmentation
Paper and Code
Mar 18, 2022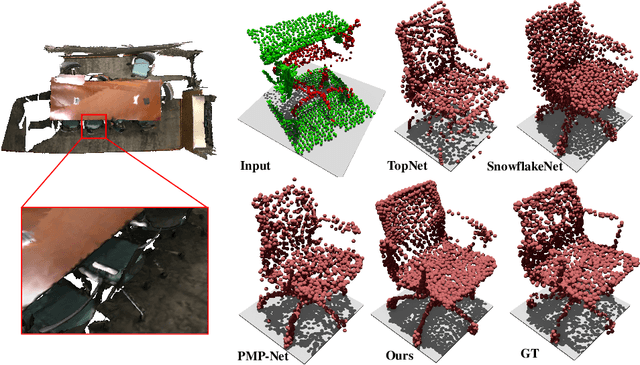
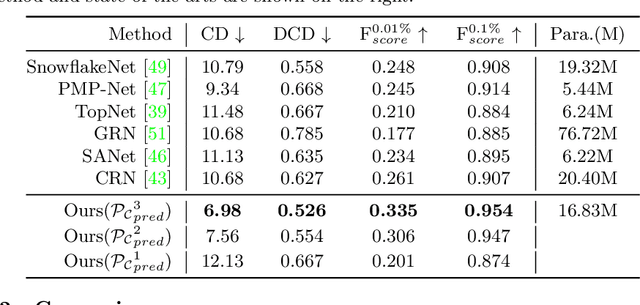
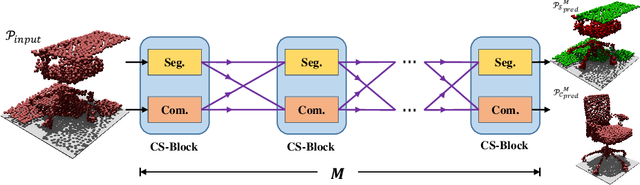
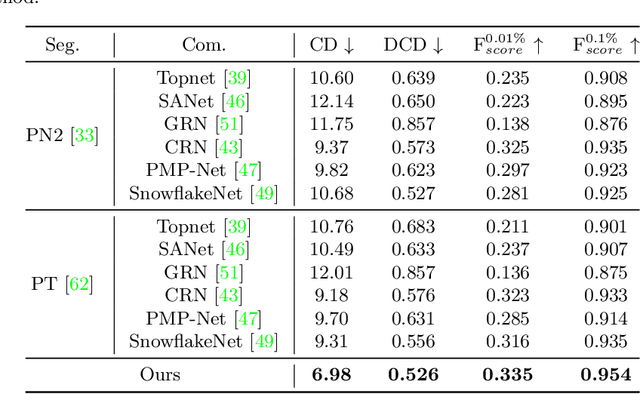
Most existing point cloud completion methods are only applicable to partial point clouds without any noises and outliers, which does not always hold in practice. We propose in this paper an end-to-end network, named CS-Net, to complete the point clouds contaminated by noises or containing outliers. In our CS-Net, the completion and segmentation modules work collaboratively to promote each other, benefited from our specifically designed cascaded structure. With the help of segmentation, more clean point cloud is fed into the completion module. We design a novel completion decoder which harnesses the labels obtained by segmentation together with FPS to purify the point cloud and leverages KNN-grouping for better generation. The completion and segmentation modules work alternately share the useful information from each other to gradually improve the quality of prediction. To train our network, we build a dataset to simulate the real case where incomplete point clouds contain outliers. Our comprehensive experiments and comparisons against state-of-the-art completion methods demonstrate our superiority. We also compare with the scheme of segmentation followed by completion and their end-to-end fusion, which also proves our efficacy.