 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompare Contact Model-based Control and Contact Model-free Learning: A Survey of Robotic Peg-in-hole Assembly Strategies
Paper and Code
Apr 10, 2019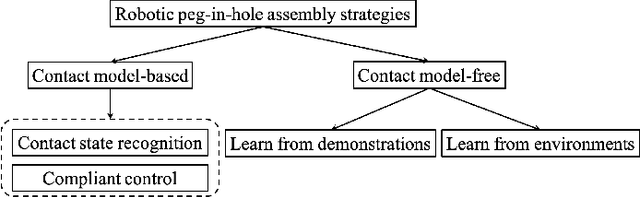
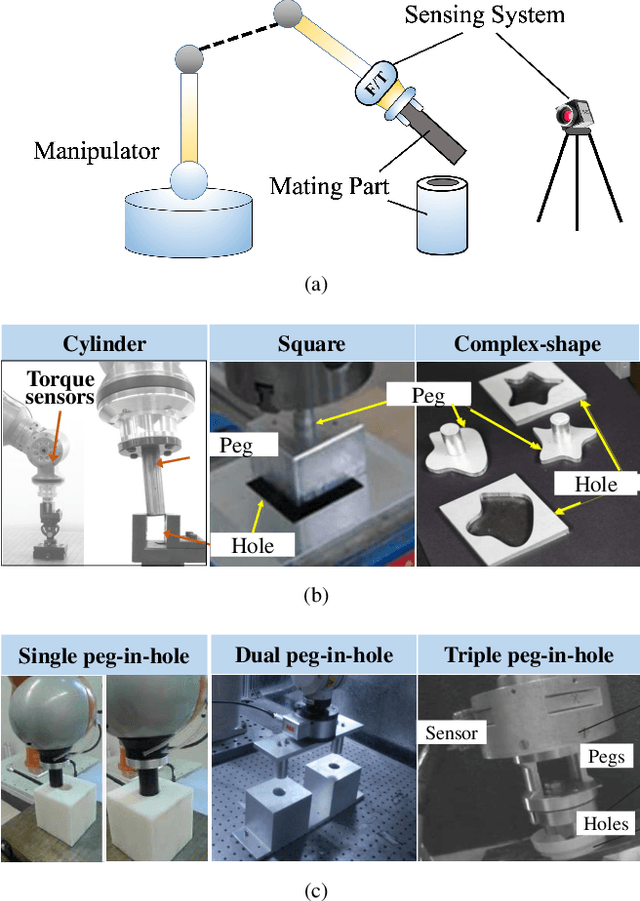
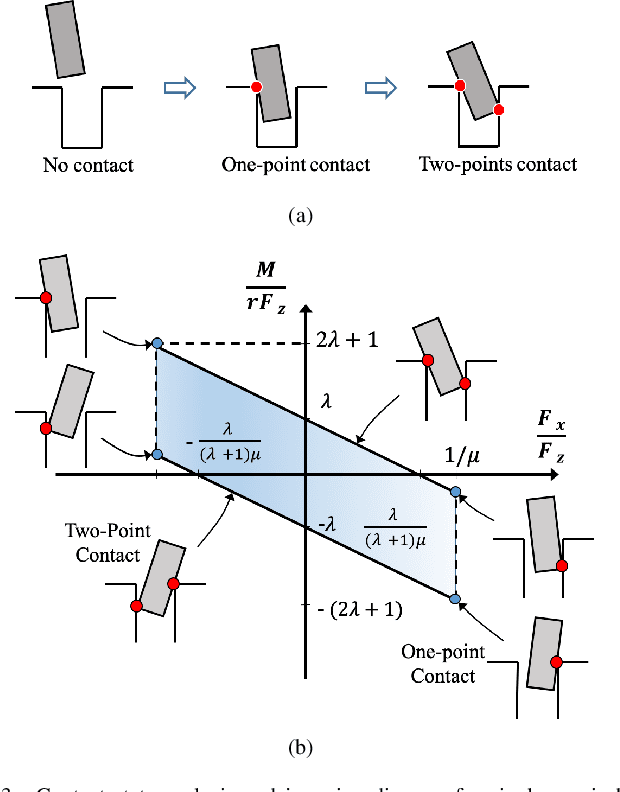
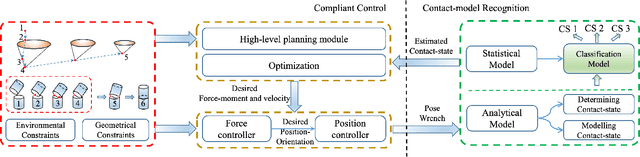
In this paper, we present an overview of robotic peg-in-hole assembly and analyze two main strategies: contact model-based and contact model-free strategies. More specifically, we first introduce the contact model control approaches, including contact state recognition and compliant control two steps. Additionally, we focus on a comprehensive analysis of the whole robotic assembly system. Second, without the contact state recognition process, we decompose the contact model-free learning algorithms into two main subfields: learning from demonstrations and learning from environments (mainly based on reinforcement learning). For each subfield, we survey the landmark studies and ongoing research to compare the different categories. We hope to strengthen the relation between these two research communities by revealing the underlying links. Ultimately, the remaining challenges and open questions in the field of robotic peg-in-hole assembly community is discussed. The promising directions and potential future work are also considered.