 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommonsense Spatial Reasoning for Visually Intelligent Agents
Paper and Code
Apr 01, 2021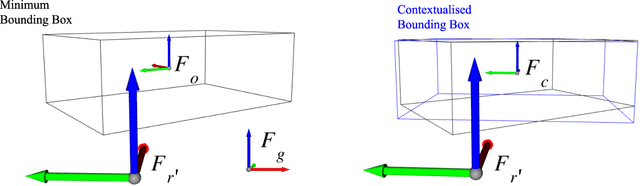
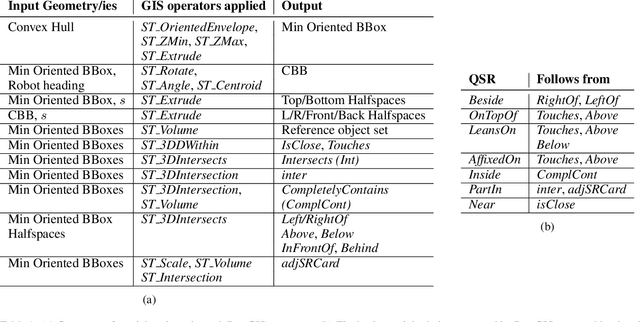
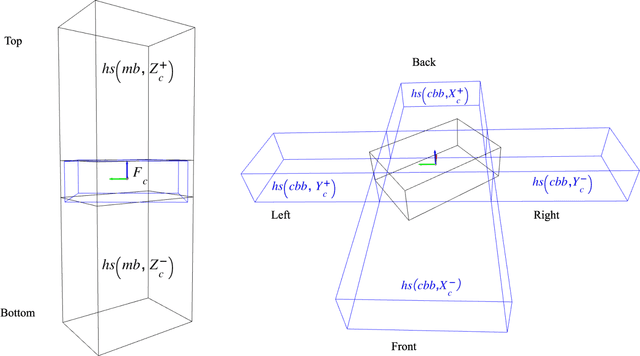
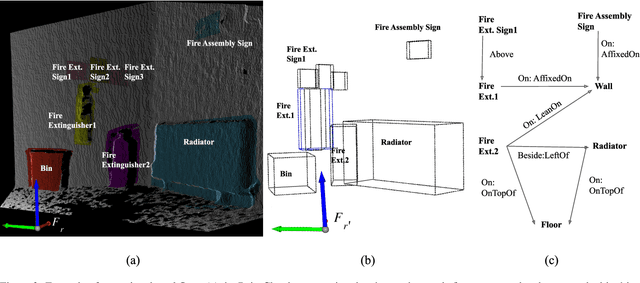
Service robots are expected to reliably make sense of complex, fast-changing environments. From a cognitive standpoint, they need the appropriate reasoning capabilities and background knowledge required to exhibit human-like Visual Intelligence. In particular, our prior work has shown that the ability to reason about spatial relations between objects in the world is a key requirement for the development of Visually Intelligent Agents. In this paper, we present a framework for commonsense spatial reasoning which is tailored to real-world robotic applications. Differently from prior approaches to qualitative spatial reasoning, the proposed framework is robust to variations in the robot's viewpoint and object orientation. The spatial relations in the proposed framework are also mapped to the types of commonsense predicates used to describe typical object configurations in English. In addition, we also show how this formally-defined framework can be implemented in a concrete spatial database.