 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoMaL Tracking: Tracking Points at the Object Boundaries
Paper and Code
Jun 07, 2017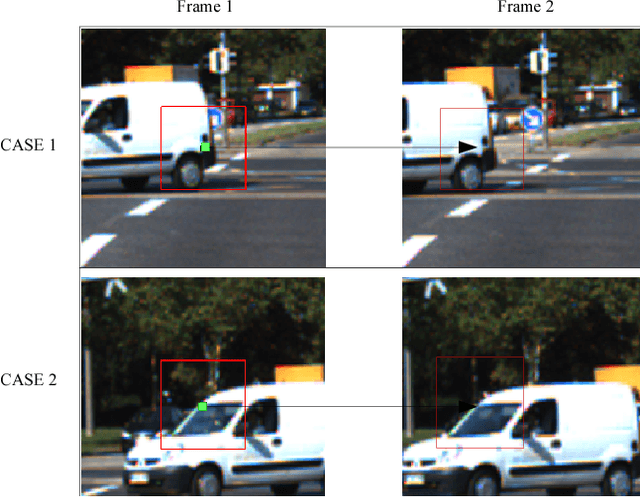
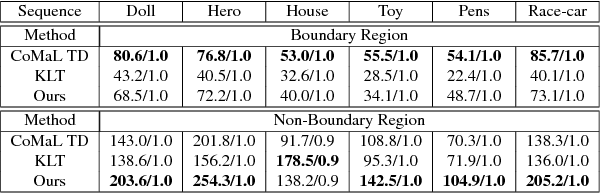
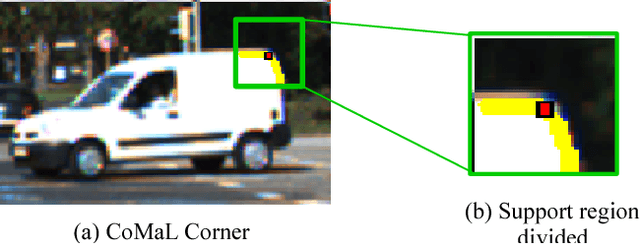
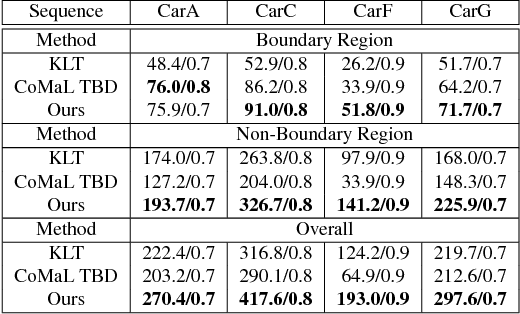
Traditional point tracking algorithms such as the KLT use local 2D information aggregation for feature detection and tracking, due to which their performance degrades at the object boundaries that separate multiple objects. Recently, CoMaL Features have been proposed that handle such a case. However, they proposed a simple tracking framework where the points are re-detected in each frame and matched. This is inefficient and may also lose many points that are not re-detected in the next frame. We propose a novel tracking algorithm to accurately and efficiently track CoMaL points. For this, the level line segment associated with the CoMaL points is matched to MSER segments in the next frame using shape-based matching and the matches are further filtered using texture-based matching. Experiments show improvements over a simple re-detect-and-match framework as well as KLT in terms of speed/accuracy on different real-world applications, especially at the object boundaries.