 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision detection or nearest-neighbor search? On the computational bottleneck in sampling-based motion planning
Paper and Code
Oct 30, 2016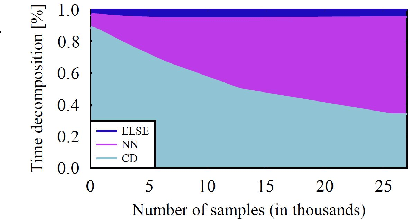
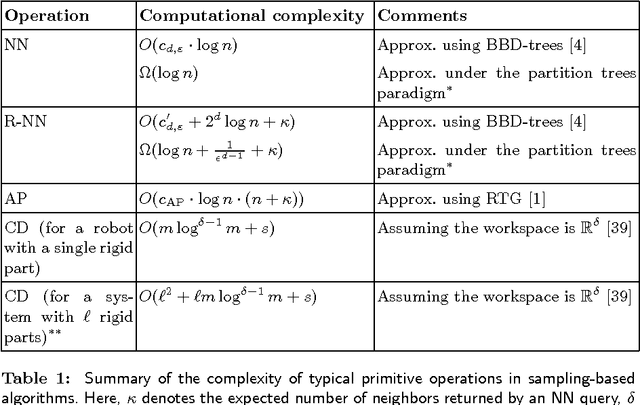
The complexity of nearest-neighbor search dominates the asymptotic running time of many sampling-based motion-planning algorithms. However, collision detection is often considered to be the computational bottleneck in practice. Examining various asymptotically optimal planning algorithms, we characterize settings, which we call NN-sensitive, in which the practical computational role of nearest-neighbor search is far from being negligible, i.e., the portion of running time taken up by nearest-neighbor search is comparable, or sometimes even greater than the portion of time taken up by collision detection. This reinforces and substantiates the claim that motion-planning algorithms could significantly benefit from efficient and possibly specifically-tailored nearest-neighbor data structures. The asymptotic (near) optimality of these algorithms relies on a prescribed connection radius, defining a ball around a configuration $q$, such that $q$ needs to be connected to all other configurations in that ball. To facilitate our study, we show how to adapt this radius to non-Euclidean spaces, which are prevalent in motion planning. This technical result is of independent interest, as it enables to compare the radial-connection approach with the common alternative, namely, connecting each configuration to its $k$ nearest neighbors ($k$-NN). Indeed, as we demonstrate, there are scenarios where using the radial connection scheme, a solution path of a specific cost is produced ten-fold (and more) faster than with $k$-NN.