 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative target-tracking control using multiple autonomous fixed-wing UAVs with constant speeds: Theory and experiments
Paper and Code
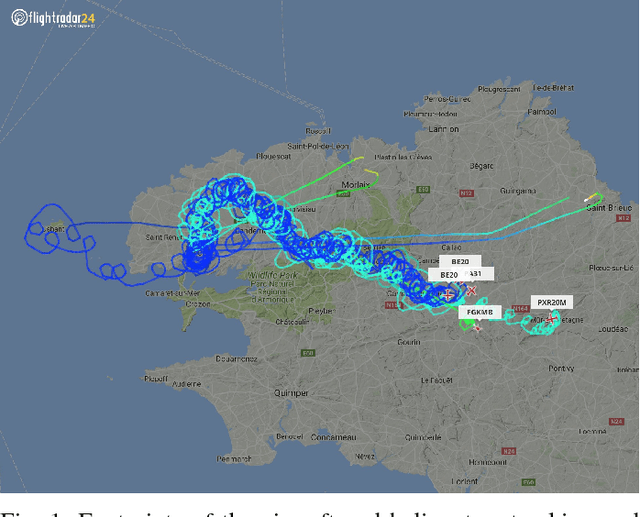
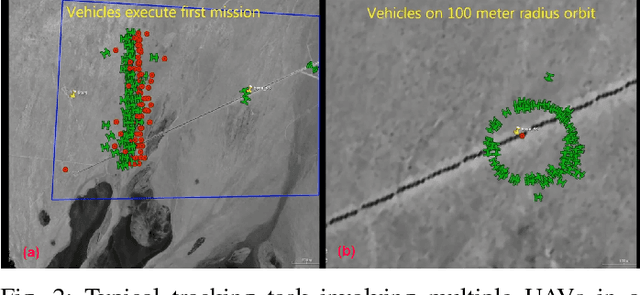

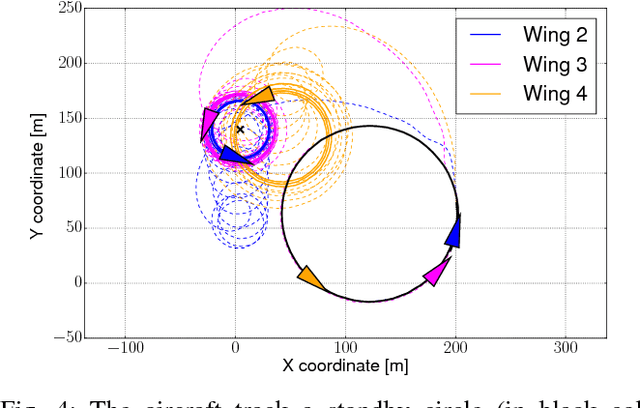
This paper considers a collaborative tracking control problem using a group of fixed-wing UAVs with constant and non-identical speeds. The dynamics of fixed-wing UAVs are modelled by unicycle-type equations, with nonholonomic constraints by assuming that UAVs fly at constant attitudes in the nominal operation mode. The control focus is on the design of a collective tracking controller such that all fixed-wing UAVs as a group can collaboratively track a desired target's position and velocity. We construct a reference velocity that includes both the target's velocity and position as feedback, which is to be tracked by the group centroid. In this way, all vehicles' headings are controlled such that the group centroid follows a reference trajectory that successfully tracks the target's trajectory. We consider three cases of reference velocity tracking: the constant velocity case, the turning velocity case with constant speed, and the time-varying velocity case. An additive spacing controller is further devised to ensure that all vehicles stay close to the group centroid trajectory. Trade-offs and performance limitations of the target tracking control due to the constant-speed constraint are also discussed in detail. Experimental results with three fixed-wing UAVs tracking a target rotorcraft are shown to validate the effectiveness and performance of the proposed tracking controllers.