 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Reinforcement Learning Based Unmanned Aerial Vehicle (UAV) Trajectory Design for 3D UAV Tracking
Paper and Code
Jan 22, 2024
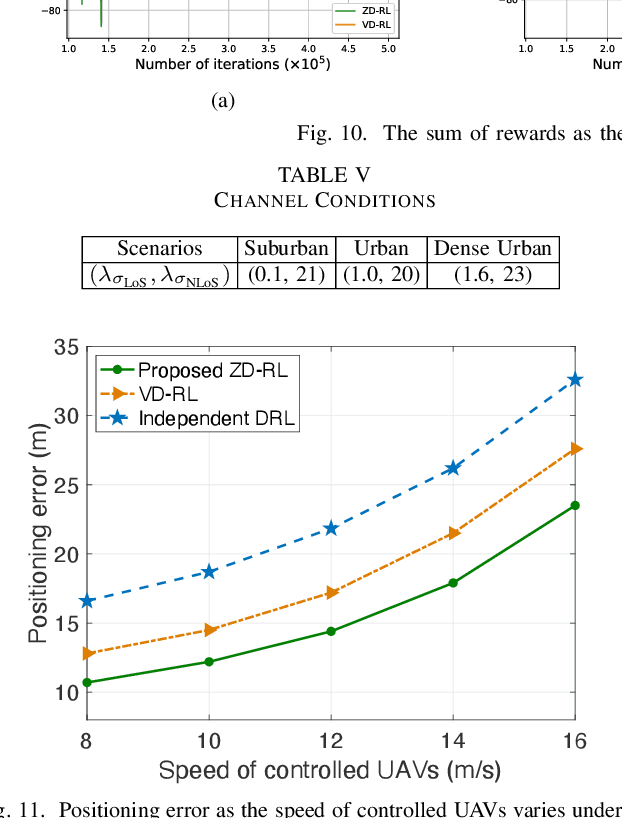

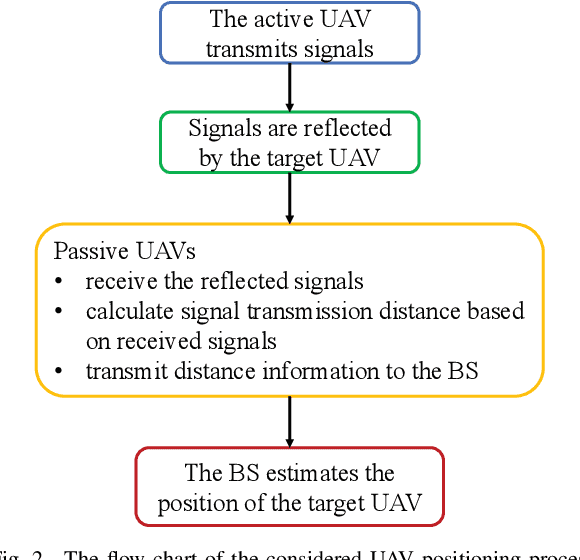
In this paper, the problem of using one active unmanned aerial vehicle (UAV) and four passive UAVs to localize a 3D target UAV in real time is investigated. In the considered model, each passive UAV receives reflection signals from the target UAV, which are initially transmitted by the active UAV. The received reflection signals allow each passive UAV to estimate the signal transmission distance which will be transmitted to a base station (BS) for the estimation of the position of the target UAV. Due to the movement of the target UAV, each active/passive UAV must optimize its trajectory to continuously localize the target UAV. Meanwhile, since the accuracy of the distance estimation depends on the signal-to-noise ratio of the transmission signals, the active UAV must optimize its transmit power. This problem is formulated as an optimization problem whose goal is to jointly optimize the transmit power of the active UAV and trajectories of both active and passive UAVs so as to maximize the target UAV positioning accuracy. To solve this problem, a Z function decomposition based reinforcement learning (ZD-RL) method is proposed. Compared to value function decomposition based RL (VD-RL), the proposed method can find the probability distribution of the sum of future rewards to accurately estimate the expected value of the sum of future rewards thus finding better transmit power of the active UAV and trajectories for both active and passive UAVs and improving target UAV positioning accuracy. Simulation results show that the proposed ZD-RL method can reduce the positioning errors by up to 39.4% and 64.6%, compared to VD-RL and independent deep RL methods, respectively.