 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Perception in Autonomous Driving: Methods, Datasets and Challenges
Paper and Code
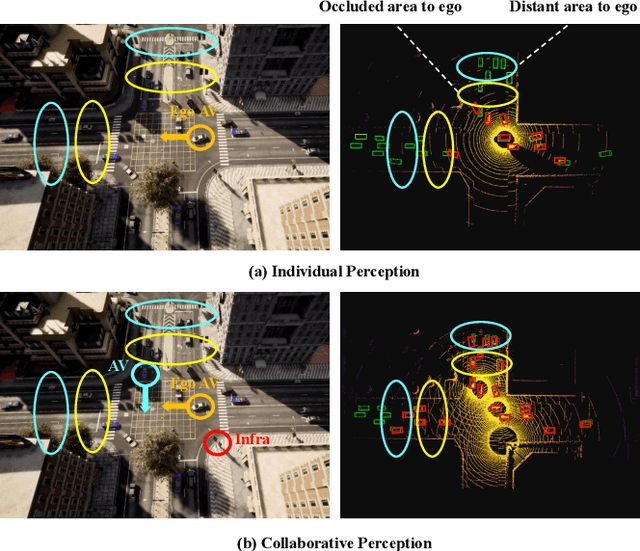
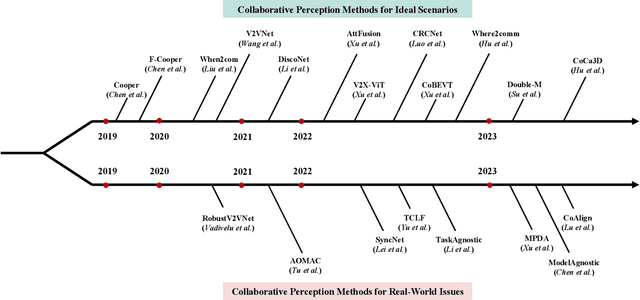
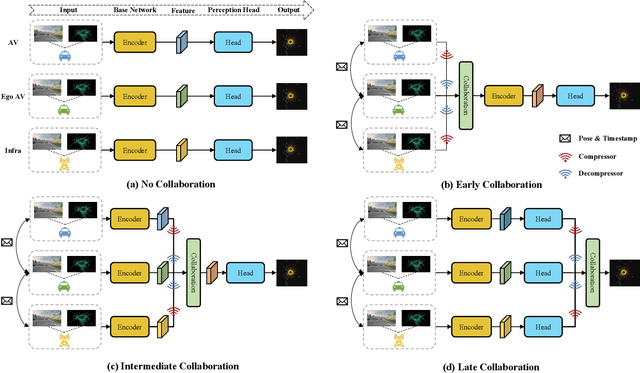
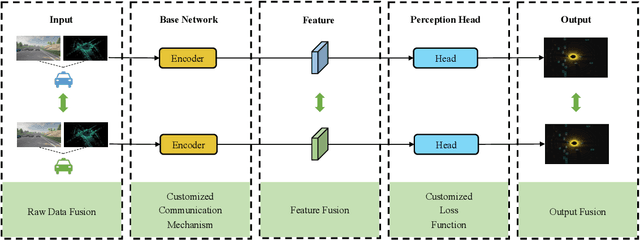
Collaborative perception is essential to address occlusion and sensor failure issues in autonomous driving. In recent years, deep learning on collaborative perception has become even thriving, with numerous methods have been proposed. Although some works have reviewed and analyzed the basic architecture and key components in this field, there is still a lack of reviews on systematical collaboration modules in perception networks and large-scale collaborative perception datasets. The primary goal of this work is to address the abovementioned issues and provide a comprehensive review of recent achievements in this field. First, we introduce fundamental technologies and collaboration schemes. Following that, we provide an overview of practical collaborative perception methods and systematically summarize the collaboration modules in networks to improve collaboration efficiency and performance while also ensuring collaboration robustness and safety. Then, we present large-scale public datasets and summarize quantitative results on these benchmarks. Finally, we discuss the remaining challenges and promising future research directions.