 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Perception for Autonomous Driving: Current Status and Future Trend
Paper and Code
Aug 22, 2022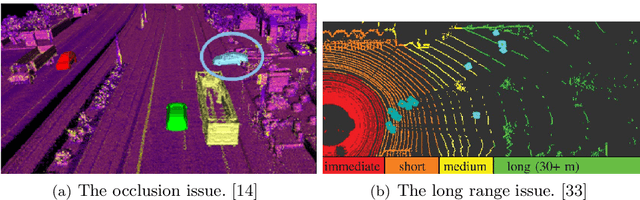
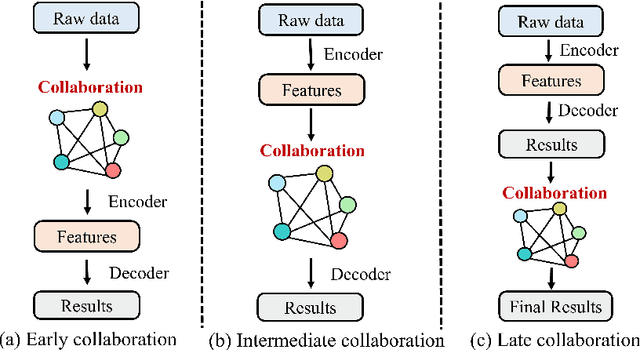
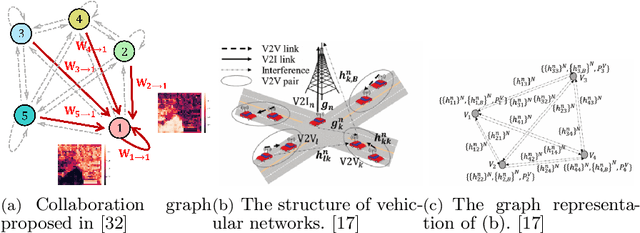
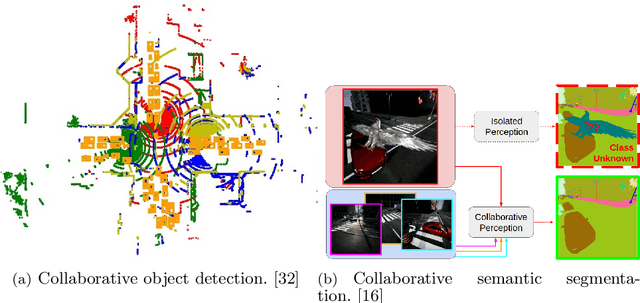
Perception is one of the crucial module of the autonomous driving system, which has made great progress recently. However, limited ability of individual vehicles results in the bottleneck of improvement of the perception performance. To break through the limits of individual perception, collaborative perception has been proposed which enables vehicles to share information to perceive the environments beyond line-of-sight and field-of-view. In this paper, we provide a review of the related work about the promising collaborative perception technology, including introducing the fundamental concepts, generalizing the collaboration modes and summarizing the key ingredients and applications of collaborative perception. Finally, we discuss the open challenges and issues of this research area and give some potential further directions.