 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Human-Agent Planning for Resilience
Paper and Code
Apr 29, 2021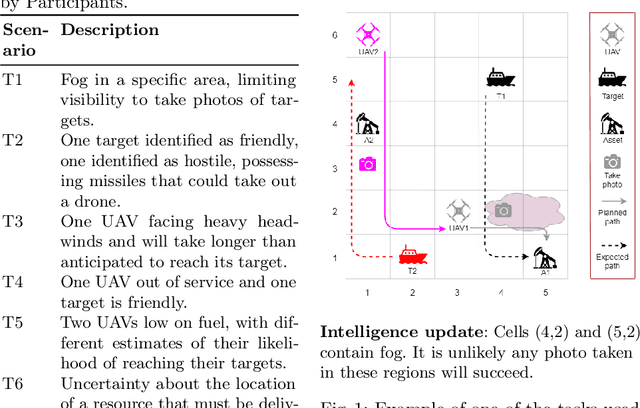
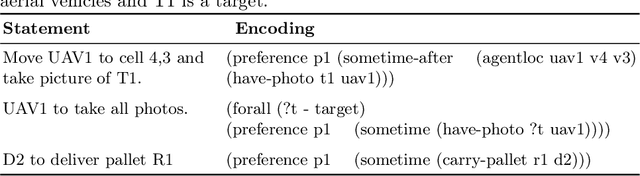
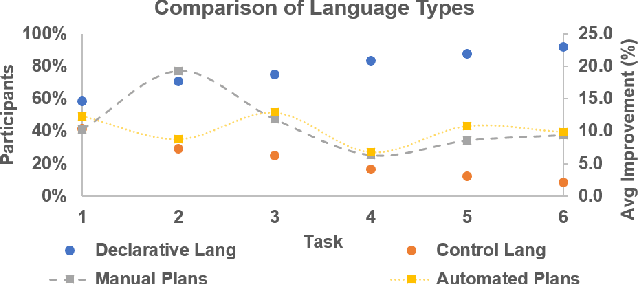
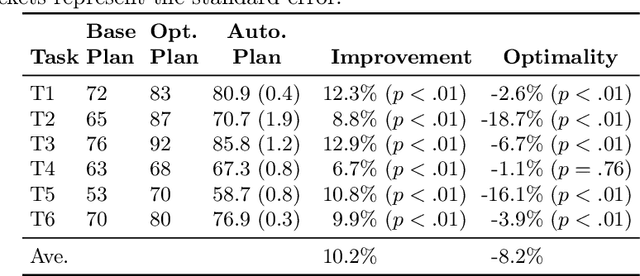
Intelligent agents powered by AI planning assist people in complex scenarios, such as managing teams of semi-autonomous vehicles. However, AI planning models may be incomplete, leading to plans that do not adequately meet the stated objectives, especially in unpredicted situations. Humans, who are apt at identifying and adapting to unusual situations, may be able to assist planning agents in these situations by encoding their knowledge into a planner at run-time. We investigate whether people can collaborate with agents by providing their knowledge to an agent using linear temporal logic (LTL) at run-time without changing the agent's domain model. We presented 24 participants with baseline plans for situations in which a planner had limitations, and asked the participants for workarounds for these limitations. We encoded these workarounds as LTL constraints. Results show that participants' constraints improved the expected return of the plans by 10% ($p < 0.05$) relative to baseline plans, demonstrating that human insight can be used in collaborative planning for resilience. However, participants used more declarative than control constraints over time, but declarative constraints produced plans less similar to the expectation of the participants, which could lead to potential trust issues.