 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCode-as-Symbolic-Planner: Foundation Model-Based Robot Planning via Symbolic Code Generation
Paper and Code
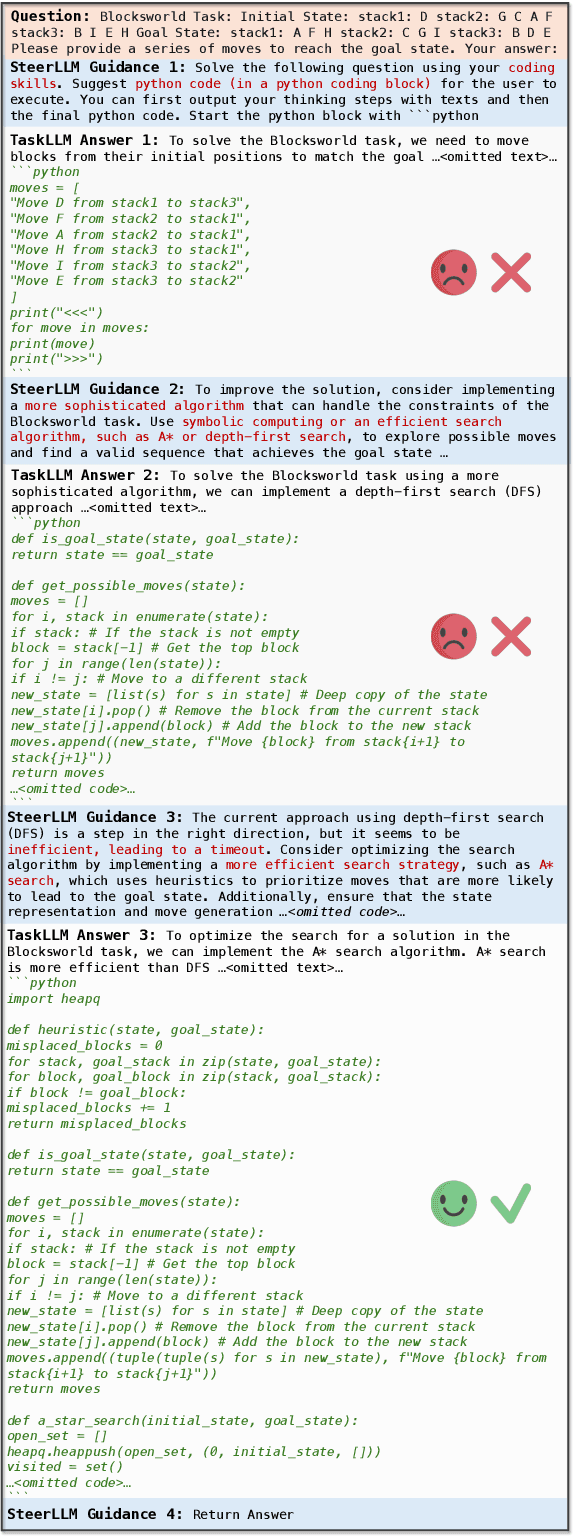
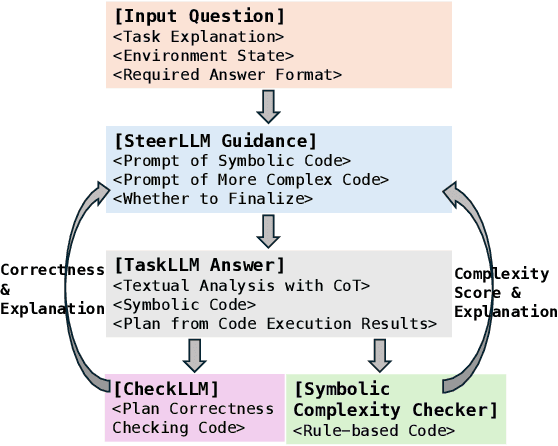
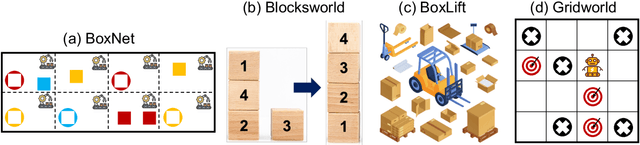
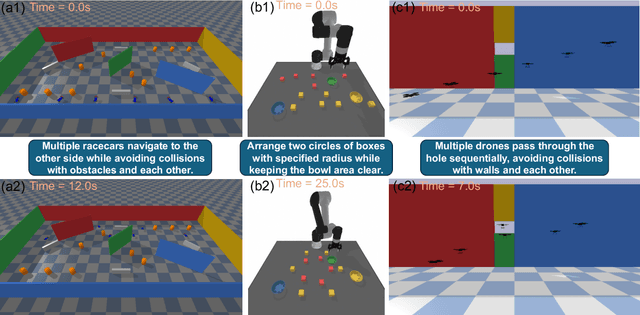
Recent works have shown great potentials of Large Language Models (LLMs) in robot task and motion planning (TAMP). Current LLM approaches generate text- or code-based reasoning chains with sub-goals and action plans. However, they do not fully leverage LLMs' symbolic computing and code generation capabilities. Many robot TAMP tasks involve complex optimization under multiple constraints, where pure textual reasoning is insufficient. While augmenting LLMs with predefined solvers and planners improves performance, it lacks generalization across tasks. Given LLMs' growing coding proficiency, we enhance their TAMP capabilities by steering them to generate code as symbolic planners for optimization and constraint verification. Unlike prior work that uses code to interface with robot action modules, we steer LLMs to generate code as solvers, planners, and checkers for TAMP tasks requiring symbolic computing, while still leveraging textual reasoning to incorporate common sense. With a multi-round guidance and answer evolution framework, the proposed Code-as-Symbolic-Planner improves success rates by average 24.1\% over best baseline methods across seven typical TAMP tasks and three popular LLMs. Code-as-Symbolic-Planner shows strong effectiveness and generalizability across discrete and continuous environments, 2D/3D simulations and real-world settings, as well as single- and multi-robot tasks with diverse requirements. See our project website https://yongchao98.github.io/Code-Symbol-Planner/ for prompts, videos, and code.