 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCNNTOP: a CNN-based Trajectory Owner Prediction Method
Paper and Code
Jan 05, 2020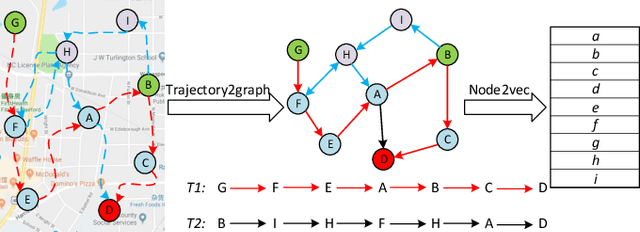
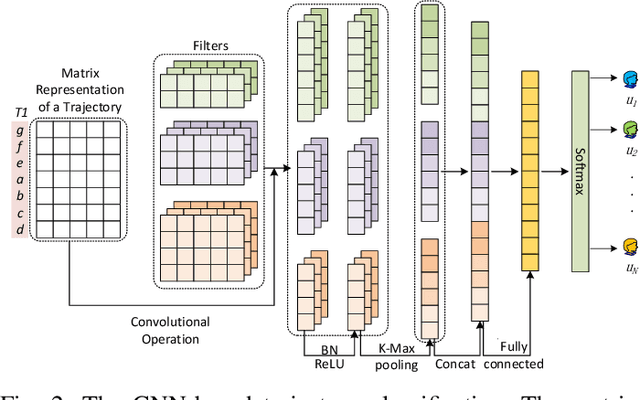
Trajectory owner prediction is the basis for many applications such as personalized recommendation, urban planning. Although much effort has been put on this topic, the results archived are still not good enough. Existing methods mainly employ RNNs to model trajectories semantically due to the inherent sequential attribute of trajectories. However, these approaches are weak at Point of Interest (POI) representation learning and trajectory feature detection. Thus, the performance of existing solutions is far from the requirements of practical applications. In this paper, we propose a novel CNN-based Trajectory Owner Prediction (CNNTOP) method. Firstly, we connect all POI according to trajectories from all users. The result is a connected graph that can be used to generate more informative POI sequences than other approaches. Secondly, we employ the Node2Vec algorithm to encode each POI into a low-dimensional real value vector. Then, we transform each trajectory into a fixed-dimensional matrix, which is similar to an image. Finally, a CNN is designed to detect features and predict the owner of a given trajectory. The CNN can extract informative features from the matrix representations of trajectories by convolutional operations, Batch normalization, and $K$-max pooling operations. Extensive experiments on real datasets demonstrate that CNNTOP substantially outperforms existing solutions in terms of macro-Precision, macro-Recall, macro-F1, and accuracy.