Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight
Paper and Code
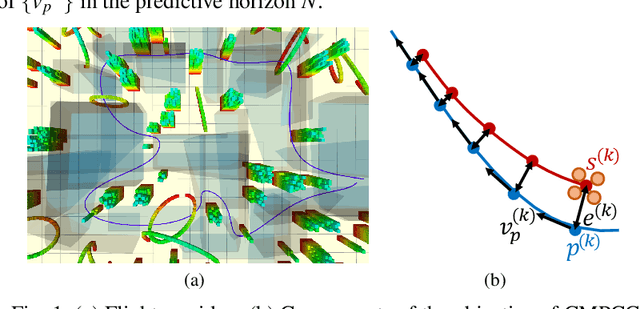
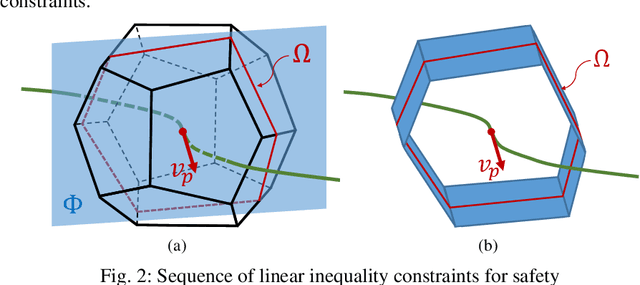
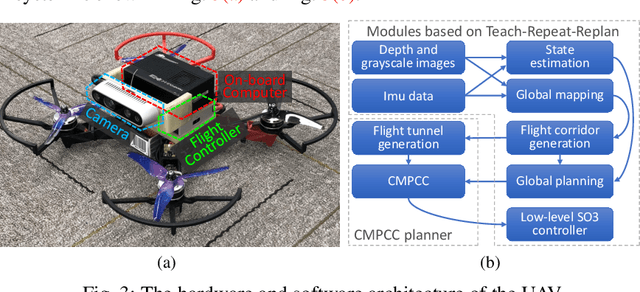
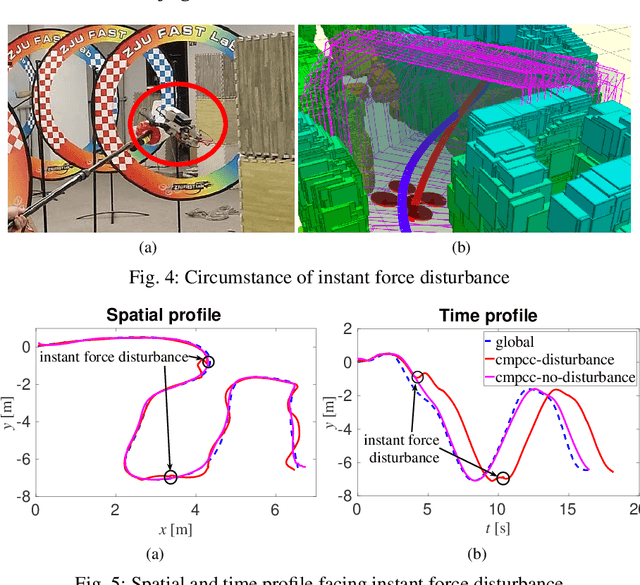
In this paper, we propose an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller. Our method is named as corridor-based model predictive contouring control (CMPCC) since it builds upon on MPCC and utilizes the flight corridor as hard safety constraints. It optimizes the flight aggressiveness and tracking accuracy simultaneously, thus improving our system's robustness by overcoming unmeasured disturbances. Our method features its online flight speed optimization, strict safety and feasibility, and real-time performance, and will be released as a low-level plugin for a large variety of quadrotor systems.
* source code: https://github.com/ZJU-FAST-Lab/CMPCC video:
https://www.youtube.com/watch?v=_7CzBh-0wQ0 summited to: iser2020
View paper on