 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloudVision: DNN-based Visual Localization of Autonomous Robots using Prebuilt LiDAR Point Cloud
Paper and Code
Sep 04, 2022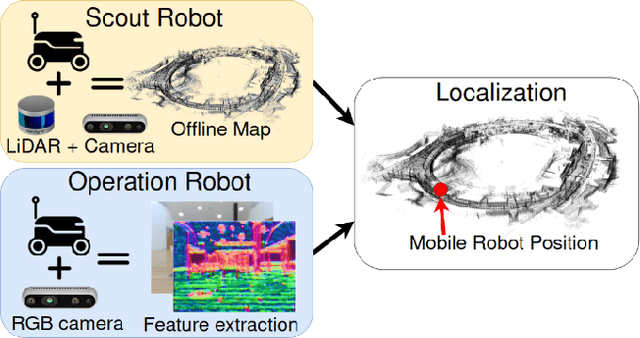
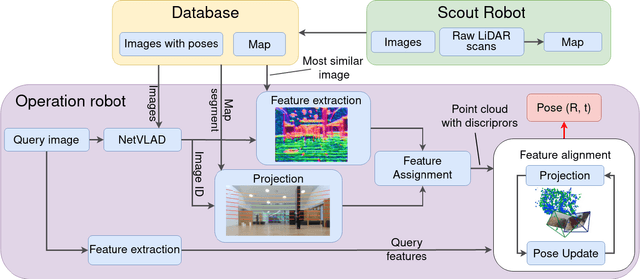
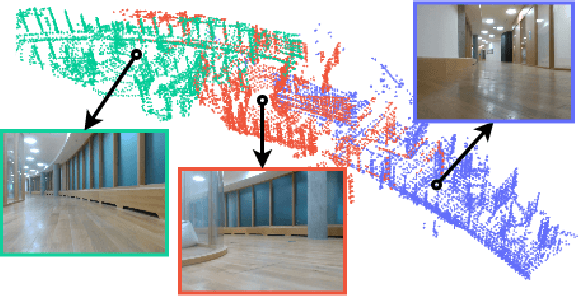

In this study, we propose a novel visual localization approach to accurately estimate six degrees of freedom (6-DoF) poses of the robot within the 3D LiDAR map based on visual data from an RGB camera. The 3D map is obtained utilizing an advanced LiDAR-based simultaneous localization and mapping (SLAM) algorithm capable of collecting a precise sparse map. The features extracted from the camera images are compared with the points of the 3D map, and then the geometric optimization problem is being solved to achieve precise visual localization. Our approach allows employing a scout robot equipped with an expensive LiDAR only once - for mapping of the environment, and multiple operational robots with only RGB cameras onboard - for performing mission tasks, with the localization accuracy higher than common camera-based solutions. The proposed method was tested on the custom dataset collected in the Skolkovo Institute of Science and Technology (Skoltech). During the process of assessing the localization accuracy, we managed to achieve centimeter-level accuracy; the median translation error was as low as 1.3 cm. The precise positioning achieved with only cameras makes possible the usage of autonomous mobile robots to solve the most complex tasks that require high localization accuracy.