 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach
Paper and Code
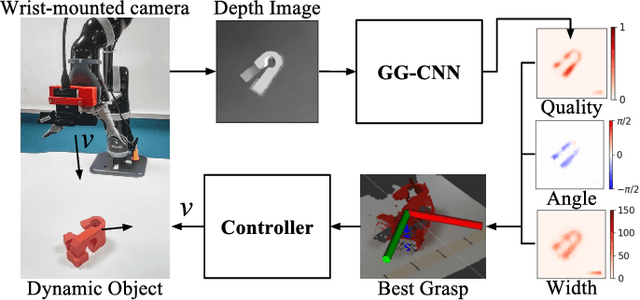
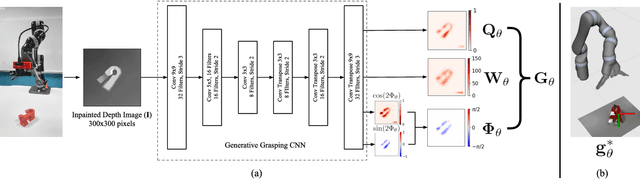
This paper presents a real-time, object-independent grasp synthesis method which can be used for closed-loop grasping. Our proposed Generative Grasping Convolutional Neural Network (GG-CNN) predicts the quality and pose of grasps at every pixel. This one-to-one mapping from a depth image overcomes limitations of current deep-learning grasping techniques by avoiding discrete sampling of grasp candidates and long computation times. Additionally, our GG-CNN is orders of magnitude smaller while detecting stable grasps with equivalent performance to current state-of-the-art techniques. The light-weight and single-pass generative nature of our GG-CNN allows for closed-loop control at up to 50Hz, enabling accurate grasping in non-static environments where objects move and in the presence of robot control inaccuracies. In our real-world tests, we achieve an 83% grasp success rate on a set of previously unseen objects with adversarial geometry and 88% on a set of household objects that are moved during the grasp attempt. We also achieve 81% accuracy when grasping in dynamic clutter.