 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-loop Model Selection for Kernel-based Models using Bayesian Optimization
Paper and Code
Sep 12, 2019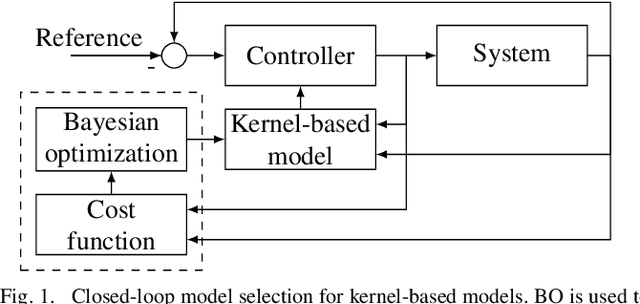
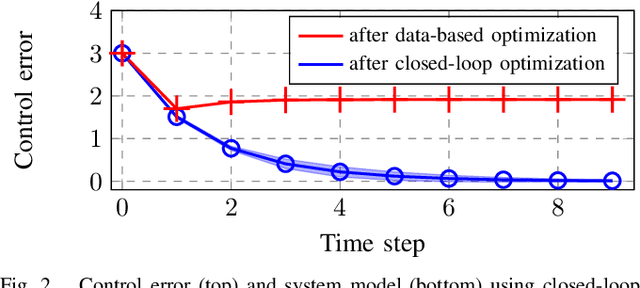

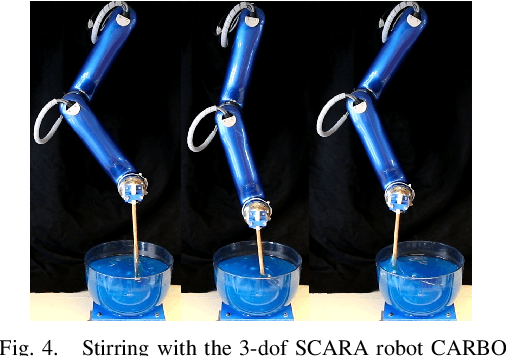
Kernel-based nonparametric models have become very attractive for model-based control approaches for nonlinear systems. However, the selection of the kernel and its hyperparameters strongly influences the quality of the learned model. Classically, these hyperparameters are optimized to minimize the prediction error of the model but this process totally neglects its later usage in the control loop. In this work, we present a framework to optimize the kernel and hyperparameters of a kernel-based model directly with respect to the closed-loop performance of the model. Our framework uses Bayesian optimization to iteratively refine the kernel-based model using the observed performance on the actual system until a desired performance is achieved. We demonstrate the proposed approach in a simulation and on a 3-DoF robotic arm.