 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassification of Safety Driver Attention During Autonomous Vehicle Operation
Paper and Code
Oct 17, 2023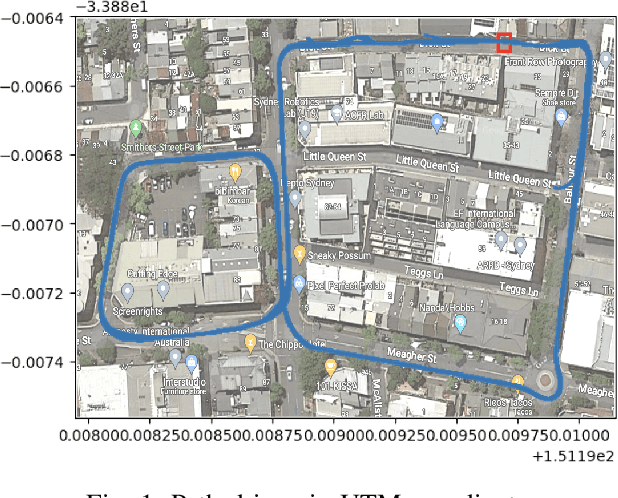


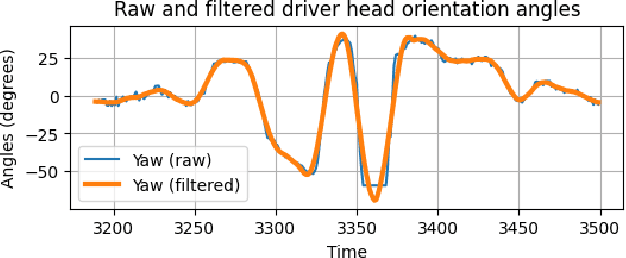
Despite the continual advances in Advanced Driver Assistance Systems (ADAS) and the development of high-level autonomous vehicles (AV), there is a general consensus that for the short to medium term, there is a requirement for a human supervisor to handle the edge cases that inevitably arise. Given this requirement, it is essential that the state of the vehicle operator is monitored to ensure they are contributing to the vehicle's safe operation. This paper introduces a dual-source approach integrating data from an infrared camera facing the vehicle operator and vehicle perception systems to produce a metric for driver alertness in order to promote and ensure safe operator behaviour. The infrared camera detects the driver's head, enabling the calculation of head orientation, which is relevant as the head typically moves according to the individual's focus of attention. By incorporating environmental data from the perception system, it becomes possible to determine whether the vehicle operator observes objects in the surroundings. Experiments were conducted using data collected in Sydney, Australia, simulating AV operations in an urban environment. Our results demonstrate that the proposed system effectively determines a metric for the attention levels of the vehicle operator, enabling interventions such as warnings or reducing autonomous functionality as appropriate. This comprehensive solution shows promise in contributing to ADAS and AVs' overall safety and efficiency in a real-world setting.