 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCineMPC: Controlling Camera Intrinsics and Extrinsics for Autonomous Cinematography
Paper and Code
Apr 08, 2021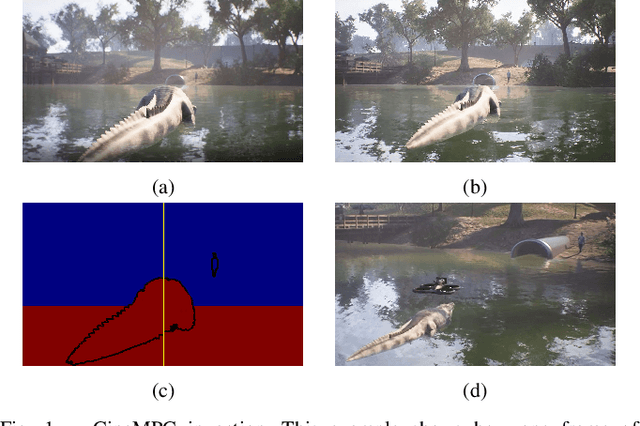


We present CineMPC, an algorithm to autonomously control a UAV-borne video camera in a nonlinear MPC loop. CineMPC controls both the position and orientation of the camera-the camera extrinsics-as well as the lens focal length, focal distance, and aperture-the camera intrinsics. While some existing solutions autonomously control the position and orientation of the camera, no existing solutions also control the intrinsic parameters, which are essential tools for rich cinematographic expression. The intrinsic parameters control the parts of the scene that are focused or blurred, and the viewers' perception of depth in the scene. Cinematographers commonly use the camera intrinsics to direct the viewers' attention through the use of focus, to convey suspense through telephoto views, inspire awe through wide-angle views, and generally to convey an emotionally rich viewing experience. Our algorithm can use any existing approach to detect the subjects in the scene, and tracks those subjects throughout a user-specified desired camera trajectory that includes camera intrinsics. CineMPC closes the loop from camera images to UAV trajectory in order to follow the desired relative trajectory as the subjects move through the scene. The cinematographer can use CineMPC to autonomously record scenes using the full array of cinematographic tools for artistic expression.