 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChi-square Tests Driven Method for Learning the Structure of Factored MDPs
Paper and Code
Jun 27, 2012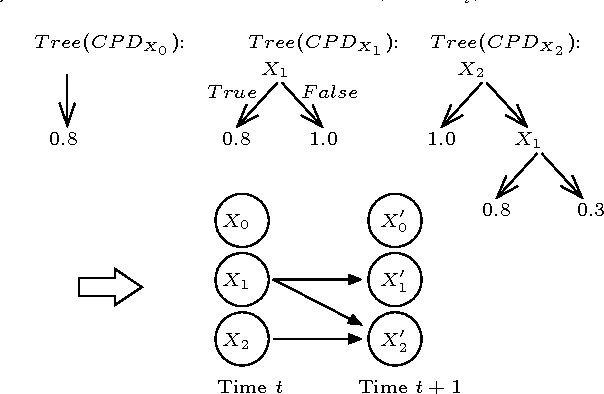
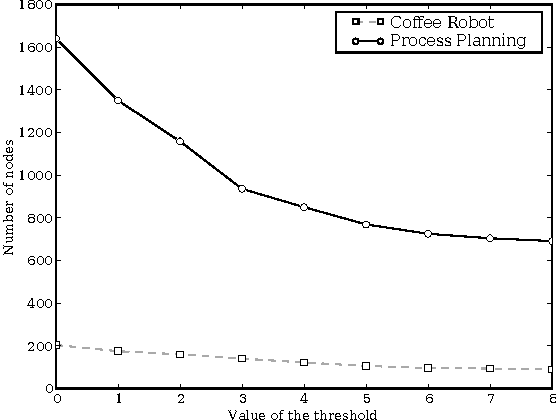
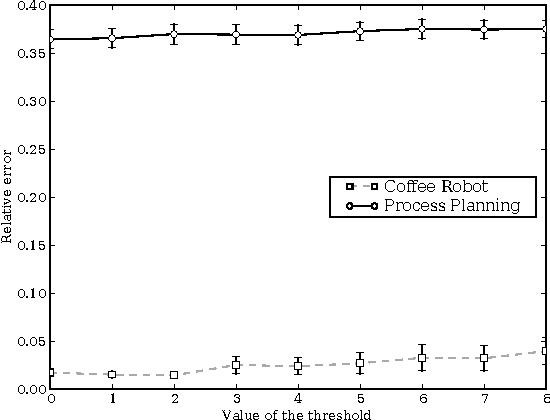
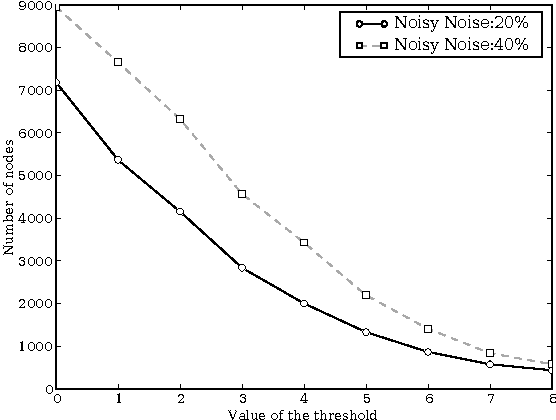
SDYNA is a general framework designed to address large stochastic reinforcement learning problems. Unlike previous model based methods in FMDPs, it incrementally learns the structure and the parameters of a RL problem using supervised learning techniques. Then, it integrates decision-theoric planning algorithms based on FMDPs to compute its policy. SPITI is an instanciation of SDYNA that exploits ITI, an incremental decision tree algorithm, to learn the reward function and the Dynamic Bayesian Networks with local structures representing the transition function of the problem. These representations are used by an incremental version of the Structured Value Iteration algorithm. In order to learn the structure, SPITI uses Chi-Square tests to detect the independence between two probability distributions. Thus, we study the relation between the threshold used in the Chi-Square test, the size of the model built and the relative error of the value function of the induced policy with respect to the optimal value. We show that, on stochastic problems, one can tune the threshold so as to generate both a compact model and an efficient policy. Then, we show that SPITI, while keeping its model compact, uses the generalization property of its learning method to perform better than a stochastic classical tabular algorithm in large RL problem with an unknown structure. We also introduce a new measure based on Chi-Square to qualify the accuracy of the model learned by SPITI. We qualitatively show that the generalization property in SPITI within the FMDP framework may prevent an exponential growth of the time required to learn the structure of large stochastic RL problems.