 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChance-Constrained Iterative Linear-Quadratic Stochastic Games
Paper and Code
Mar 02, 2022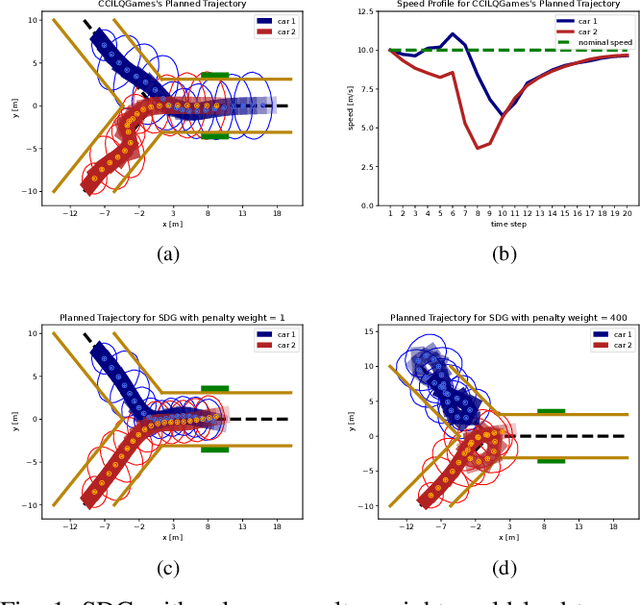
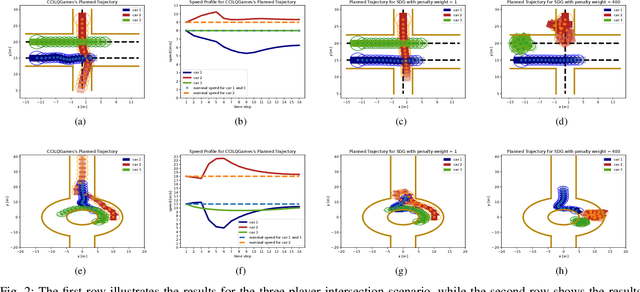
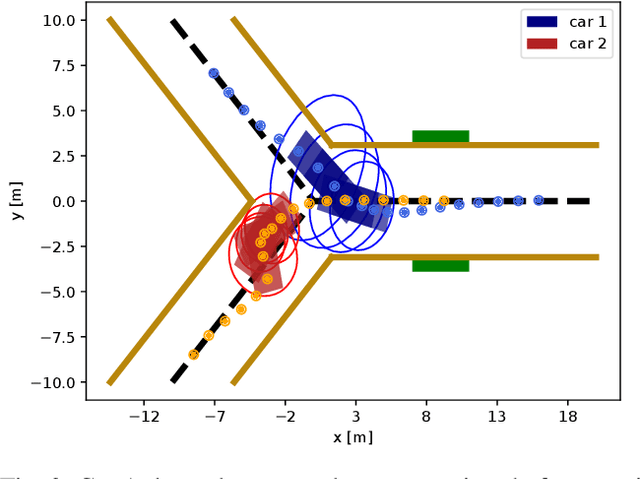

Dynamic game arises as a powerful paradigm for multi-robot planning, for which the safety constraints satisfaction is crucial. Constrained stochastic games are of particular interest, as real-world robots need to operate and satisfy constraints under uncertainty. Existing methods for solving stochastic games handle constraints using soft penalties with hand-tuned weights. However, finding a suitable penalty weight is non-trivial and requires trial and error. In this paper, we propose the chance-constrained iterative linear-quadratic stochastic games (CCILQGames) algorithm. CCILQGames solves chance-constrained stochastic games using the augmented Lagrangian method, with the merit of automatically finding a suitable penalty weight. We evaluate our algorithm in three autonomous driving scenarios, including merge, intersection, and roundabout. Experimental results and Monte Carlo tests show that CCILQGames could generate safe and interactive strategies in stochastic environments.